Team Technical Advisor
A senior electrical engineer who is working on programming the Raspberry Pi Robot to detect the soccer ball being roll through with it’s camera and and able to block it within the goal
A senior computer engineer who is working on programming the Nao Robot to detect the soccer ball being roll down through the ramp and being able to kick it to the goal
A senior electrical engineer who is working on making the ramp for the soccer ball to roll down through but being push electronically through a motor that is connected through switch. Also programming the Raspberry Pi Robot to detect the soccer ball being roll through with it’s camera and and able to block it within the goal
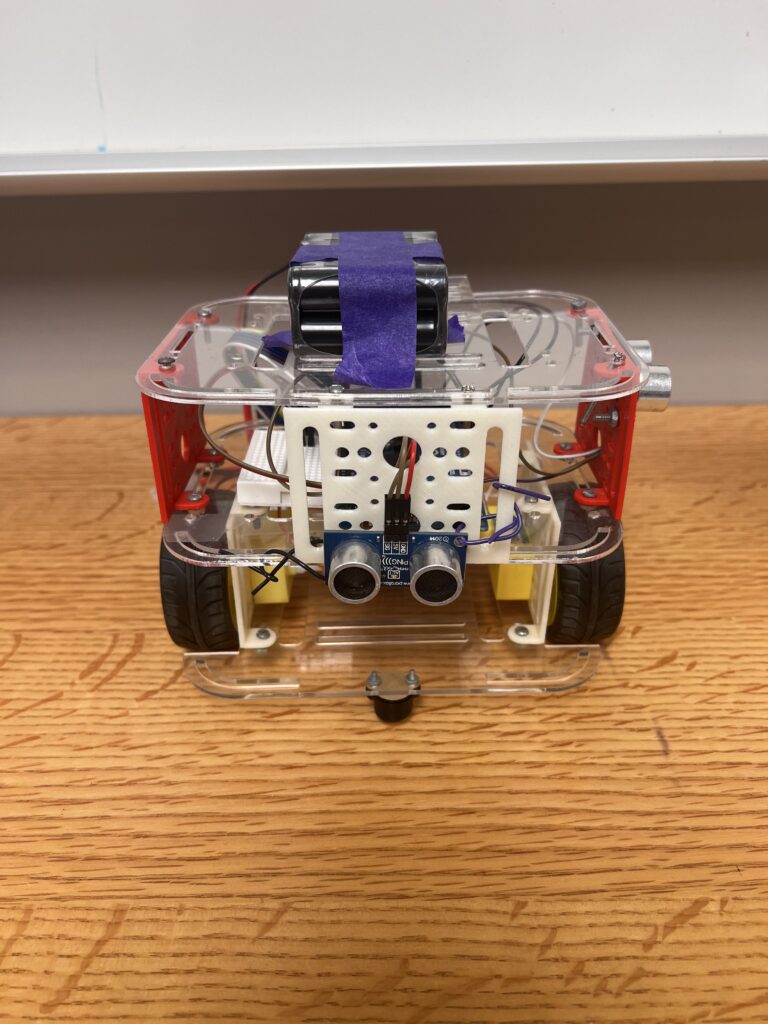
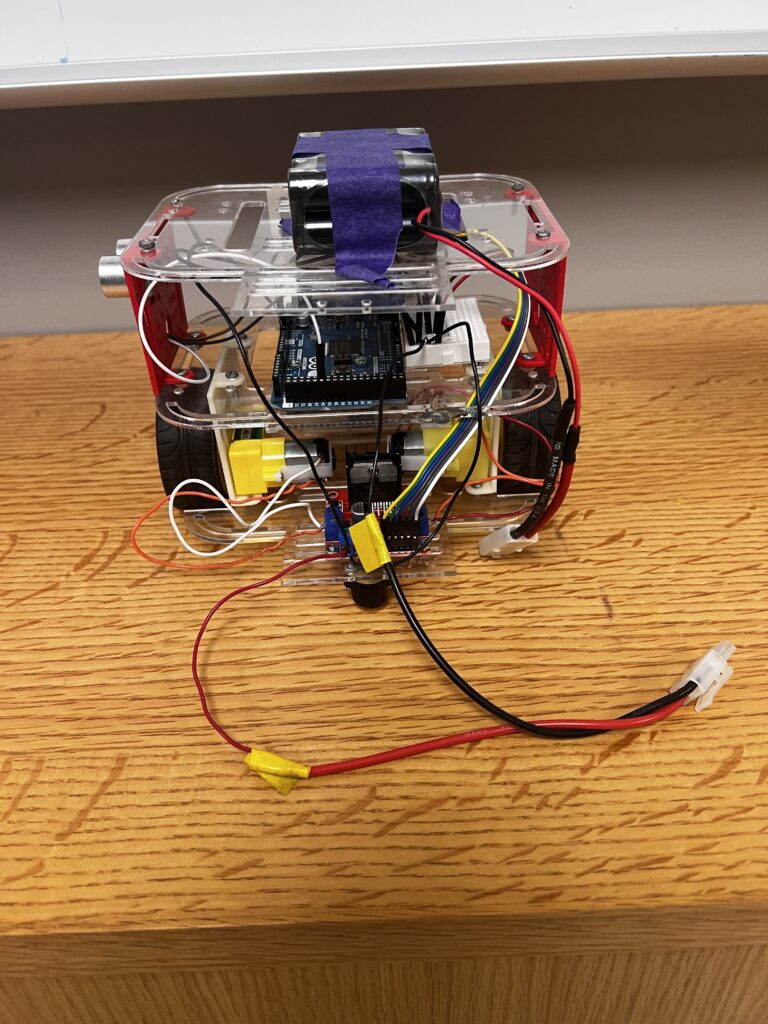
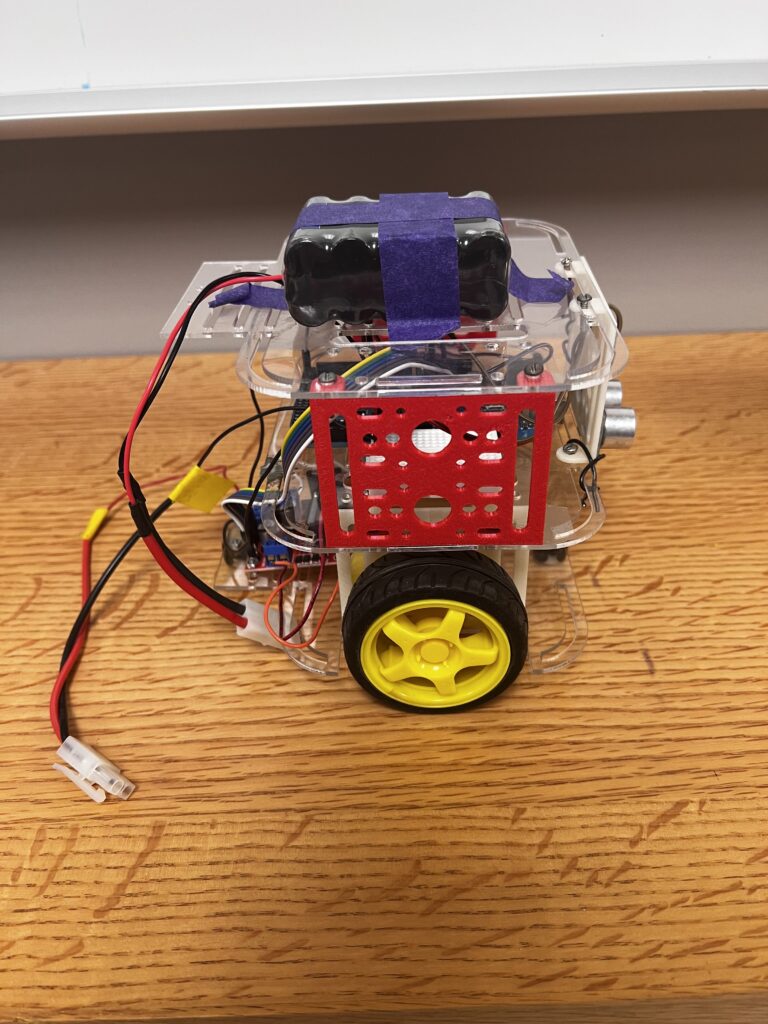
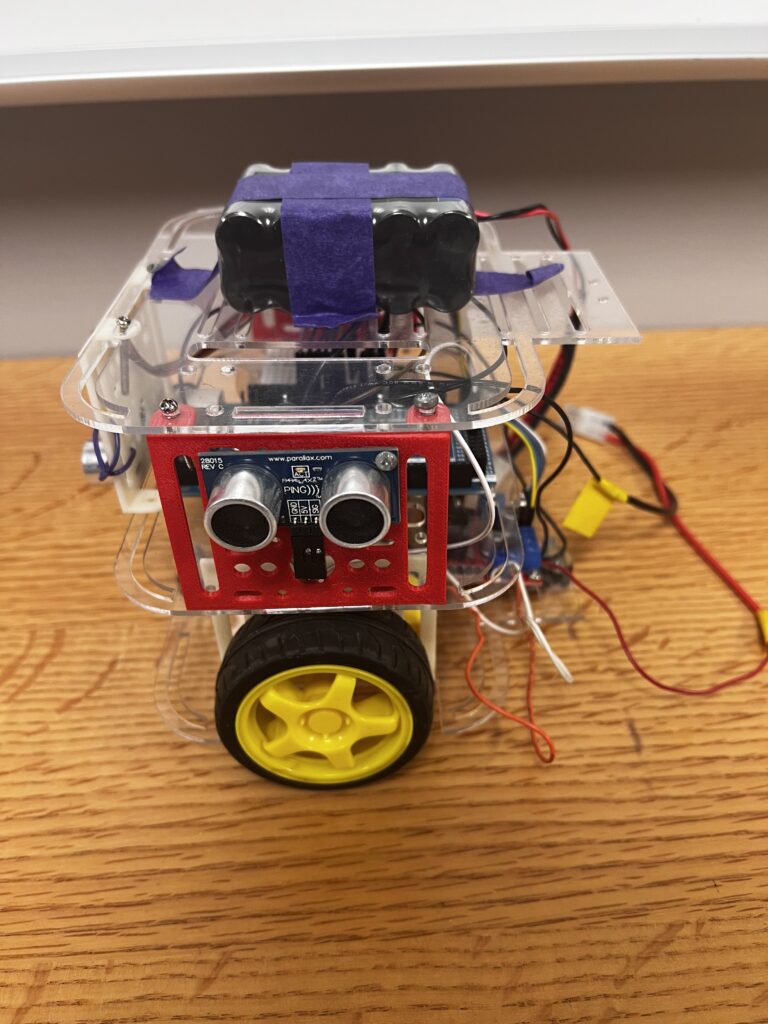
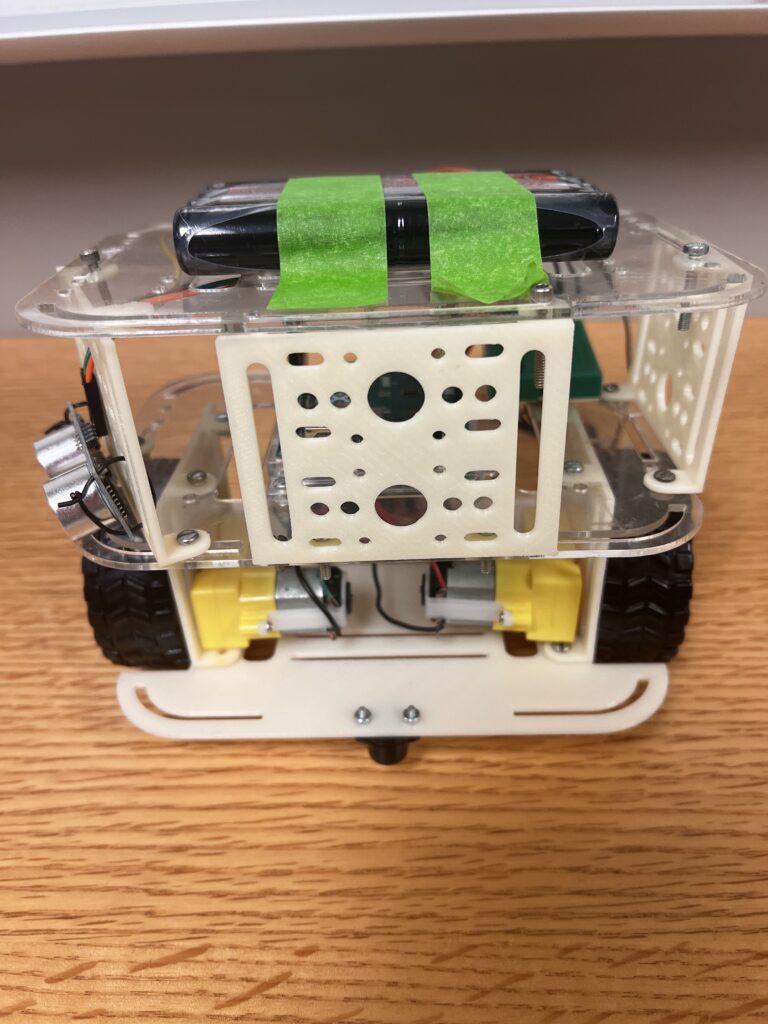
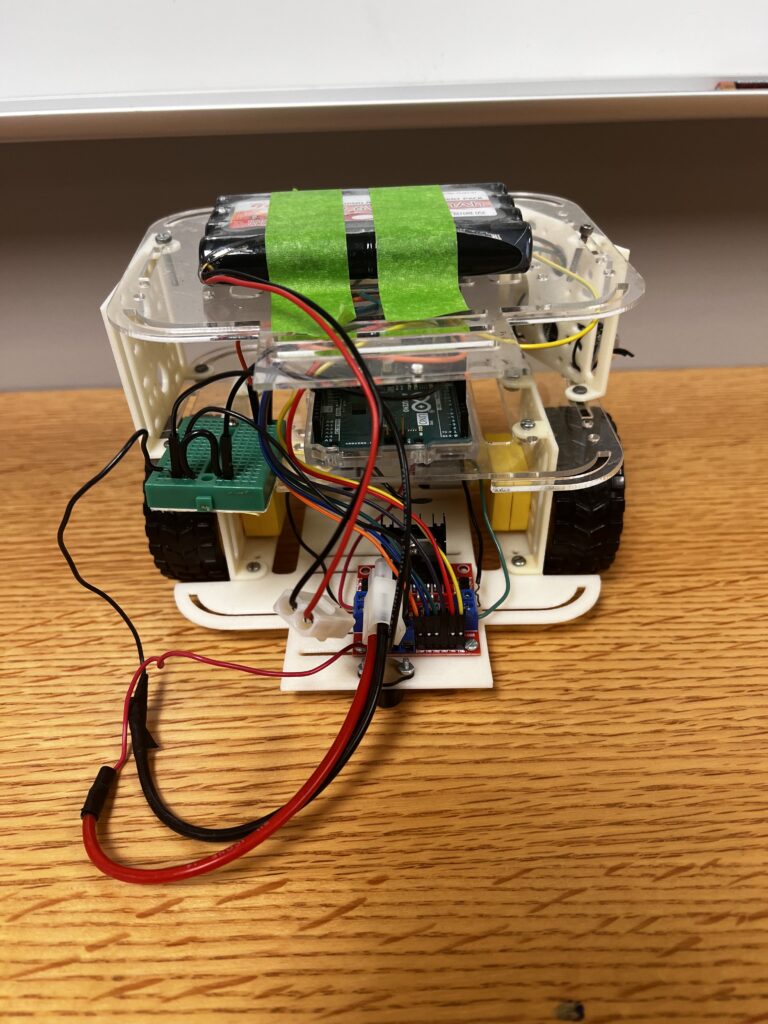
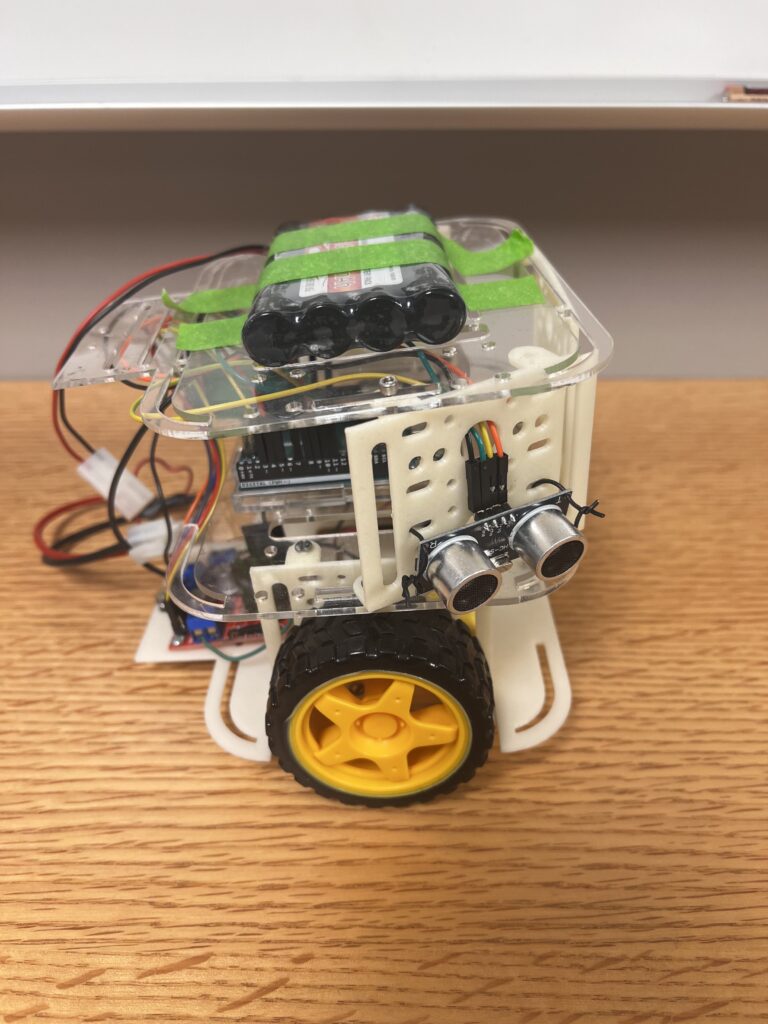
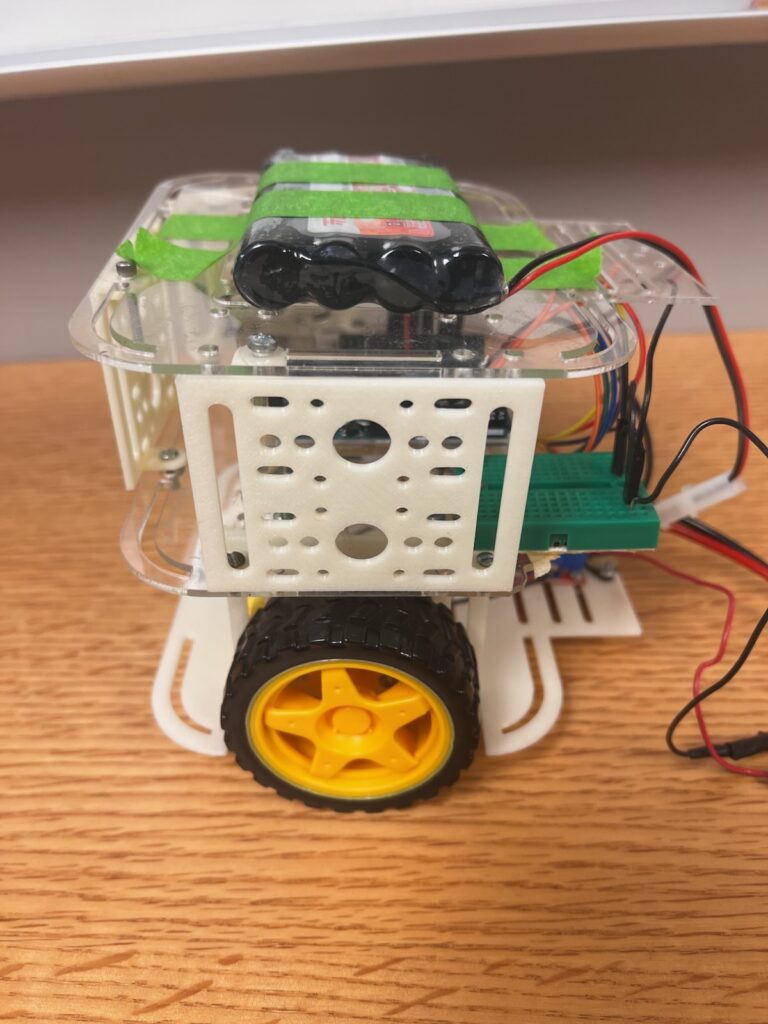
Here we will provide a new site of entertainment when it comes to soccer. Our project focuses on programming and controlling an Arduino robot & NAO robot to perform interactive soccer-related tasks. The first task involves designing an automatic ramp that enables a NAO robot to kick a ball. The second task introduces two Arduino robots, where one detects the ball from the ramp through its ultrasonic sensor and is able to hit it into the goal, while the second robot is placed as a goalie and hits the ball before it enters the goal.