
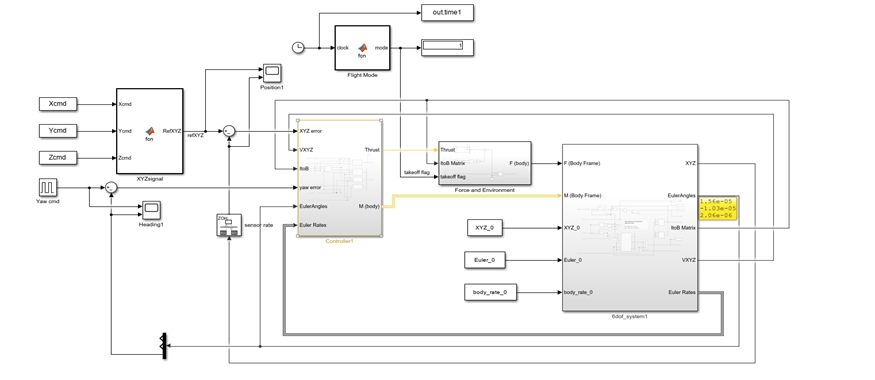
Shown above is the Simulink we customized to fit our own Drone Project!
We use a full 6-DOF model to prototype and evaluate control strategies long before we get into actual flight testing. This allows us to refine stability, trajectory tracking, and actuator behavior in a physics-accurate environment.
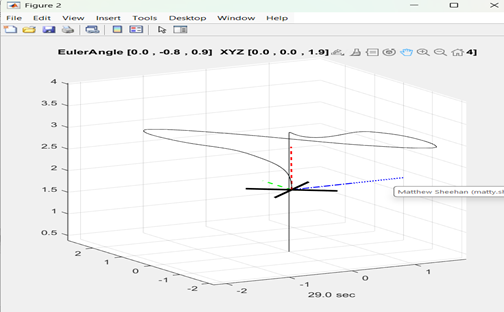
Shown above is the drone’s simulated flight path given a predetermined route. This simulation helps gather information as to how the drone will behave once we begin uploading flight dates and planned routes.