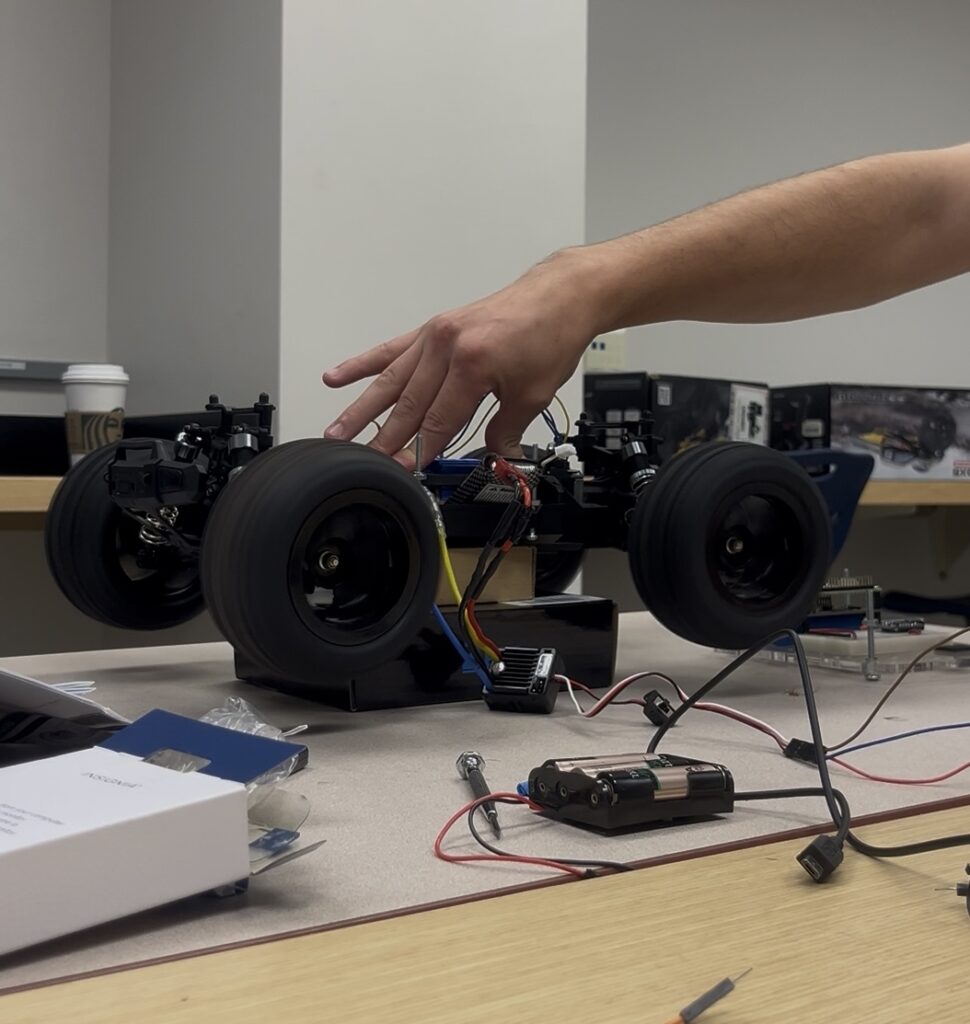
This week we finalized the core hardware for our autonomous racecar. We will be using an RPLIDAR for obstacle detection, an IMU for orientation tracking, and a Raspberry Pi as the onboard computer. To run these components, we chose Ubuntu with ROS due to its reliable libraries and drivers for LiDAR and IMU.
A full explanation of our design decisions can be found on the Design Choices page.