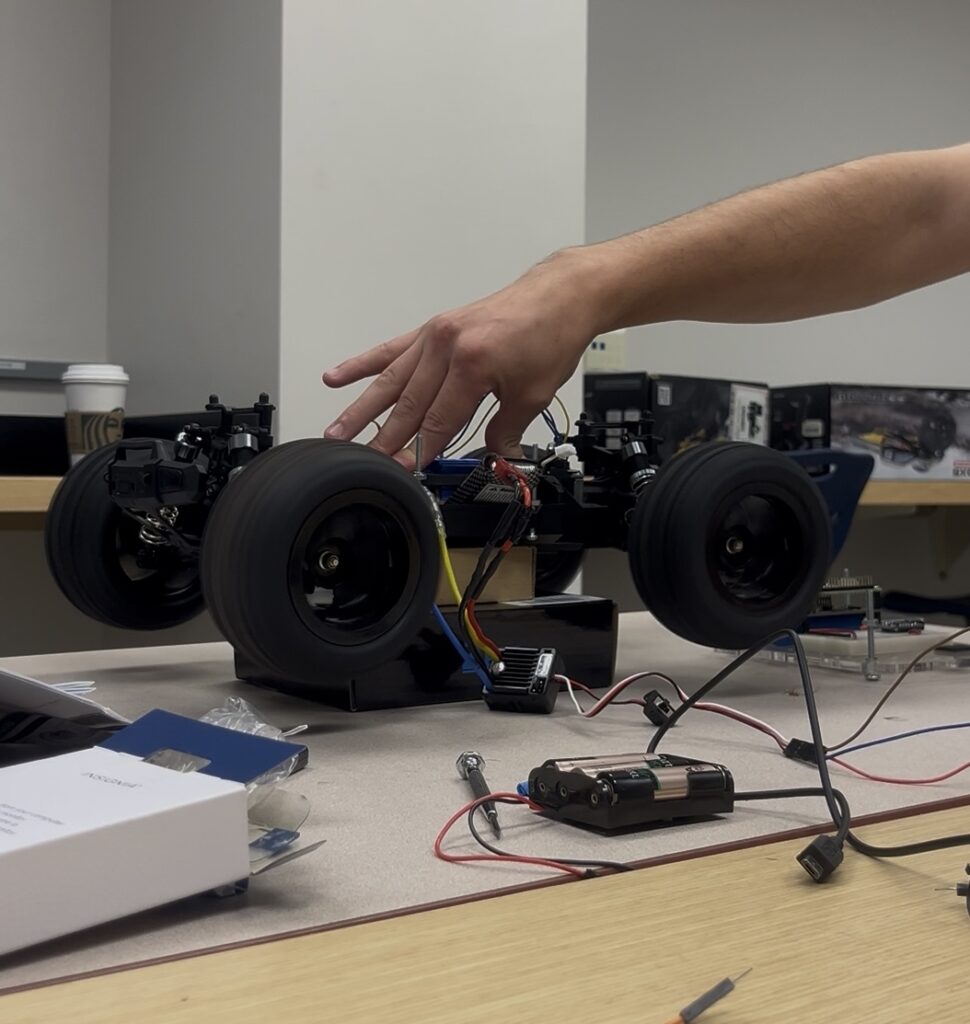
Today we implemented an Arduino Uno R3 into our racecar to test the motors response to basic drive commands. Our goal was to find out what a safe speed would be for the car to operate. Since we did not want the car to drive itself off the table, we elevated it by the base so that the wheels could spin freely. What we failed to consider was the lack of weight on the wheels, which caused the them to spin way too fast, nearly shaking the car apart. Lesson learned.