
Hardware:
RPLIDAR A1

The RPLIDAR A1 is a 360° 2D laser scanner capable of mapping the surroundings in real time. It provides distance measurements up to 12 meters, which makes it well-suited for obstacle detection and environment awareness in small-scale robotics.
Why we chose it: It offers a balance of affordability, accuracy, and ease of integration with ROS, making it a practical option for our racecar’s perception system.
Inertial Measurement Unit (IMU)
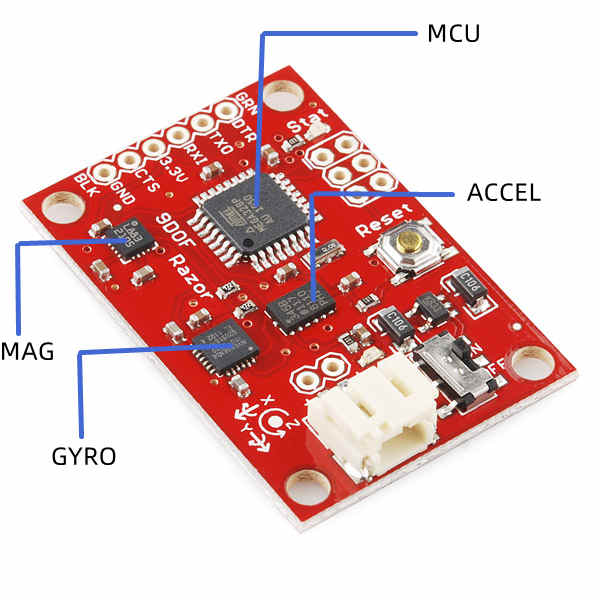
The IMU combines accelerometers, gyroscopes, and magnetometers to track motion, orientation, and angular velocity. This data is essential for localization and stability when the car is moving or turning.
Why we chose it: The IMU improves navigation by filling in gaps when LiDAR data alone is insufficient (such as quick turns or uneven surfaces). Similar to the LIDAR, the IMU also integrates smoothly with ROS.
Raspberry Pi 4 Model B
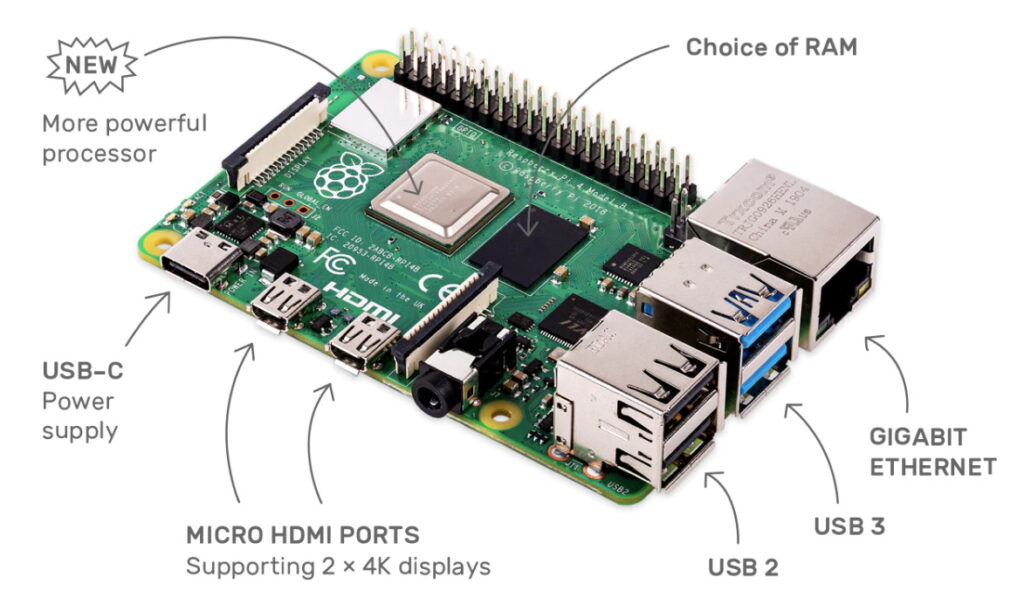
The Raspberry Pi is a compact single-board computer that provides enough processing power to run Linux, ROS, and real-time sensor communication. It also supports peripheral connections like USB and GPIO for controlling motors and reading sensor data.
Why we chose it: The Raspberry Pi is a very flexible microcontroller with strong community support. It allows us to run our software stack directly on the car without needing bulky external computing hardware.
Arduino Uno R3
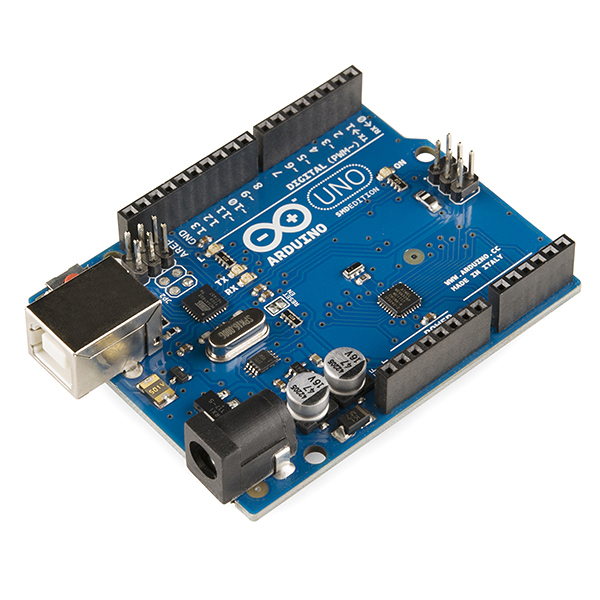
The Arduino Uno R3 is an 8-bit microcontroller board based on the ATmega328P. It offers digital and analog I/O, a 16 MHz clock, and simple USB-to-serial communication, making it ideal for reading sensors and generating control signals.
Why we chose it: The Uno handles time-critical tasks like encoder reading and motor PWM, reducing load on the Raspberry Pi and improving responsiveness. Its reliability, ease of use, and strong community support make integration straightforward.
Software:
Ubuntu with ROS

Ubuntu is a lightweight Linux operating system widely used in robotics. ROS (Robot Operating System) is a middleware framework that manages communication between sensors, algorithms, and actuators. Together, they provide a flexible platform for developing robotic systems.
Why we chose it: ROS comes with drivers and libraries for both the RPLIDAR and IMU, making the integration relatively straightforward. It also makes it easier to modify, expand, or debug our setup as the project develops, giving us both reliability and long-term flexibility.