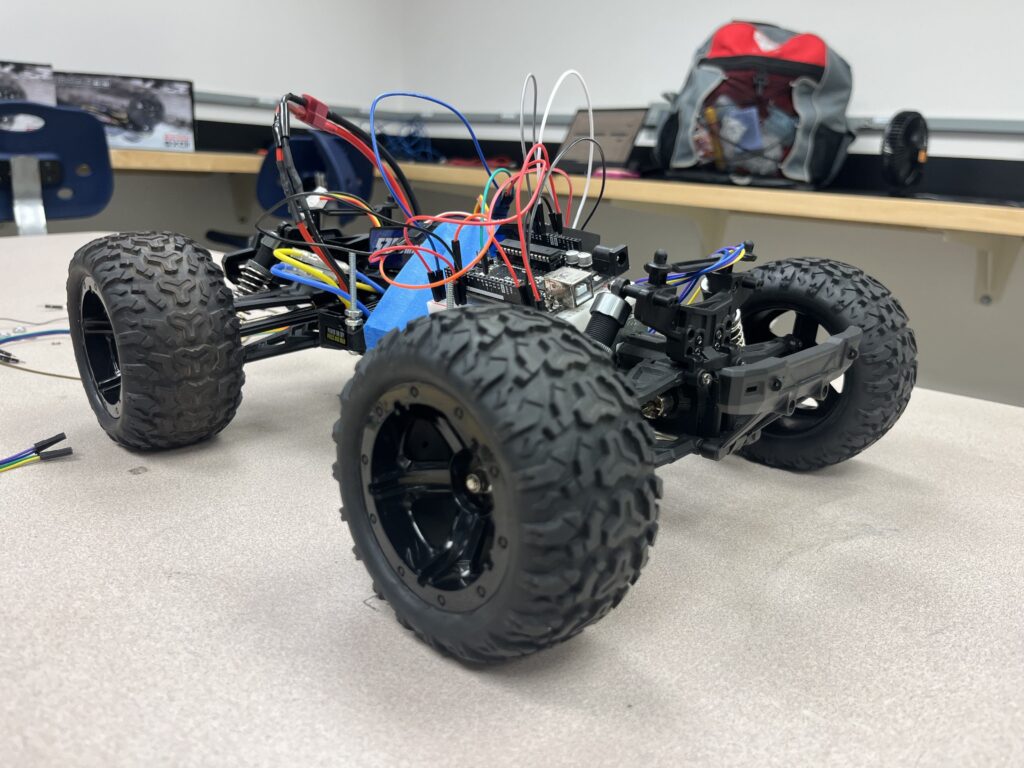
9/6/25 – 9/10/25
Developed a prototype of the racecar to test how the drive and steering motors responded to commands. To give us an idea of how the car would keep a safe distance from wall, we implemented an ultrasonic sensor to the side of the car and programmed the controller to gradually turn the car away from the wall if it got too close.
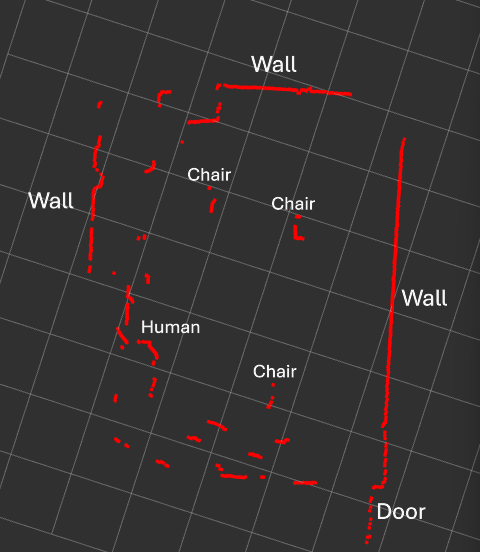
10/30/25
Got the Raspberry Pi to transmit LiDAR data of our lab room wirelessly to the laptop. We positioned the LiDAR in the middle of the room and were able to see not just the outline of the room, but also ourselves as we walked around within it.
11/6/25
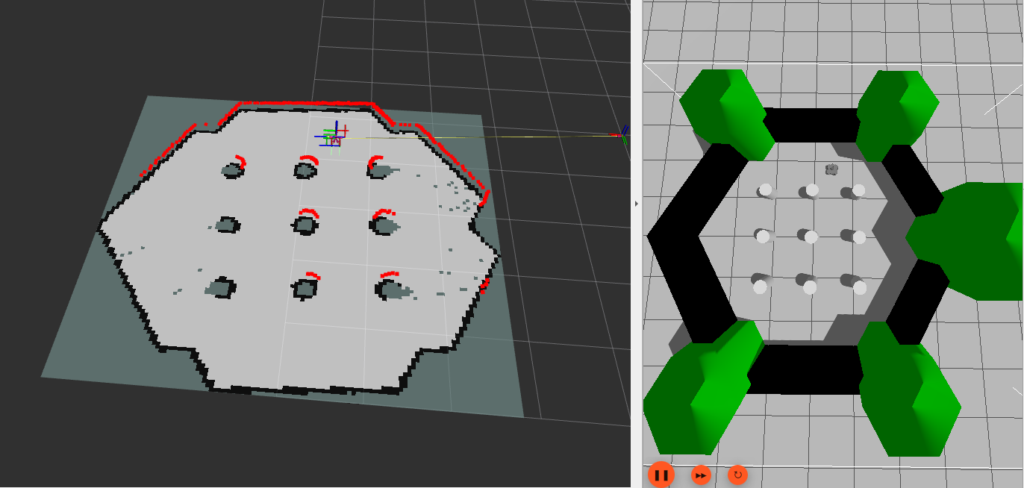
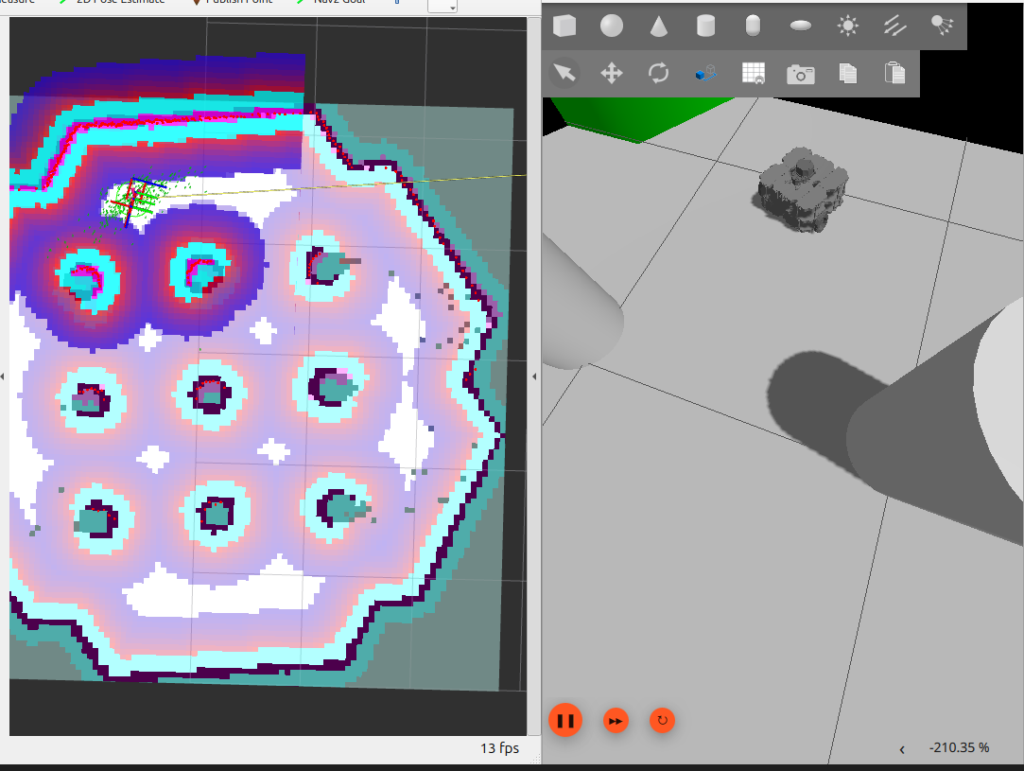
Successfully used the program “Gazebo” to simulate a robot in an environment and capture data from its simulated sensors. By using its LiDAR, we produced a map of the “Turtlebot” simulated environment, and with data from its IMU and wheel encoder, we successfully navigated to selected goal points.
11/9/25
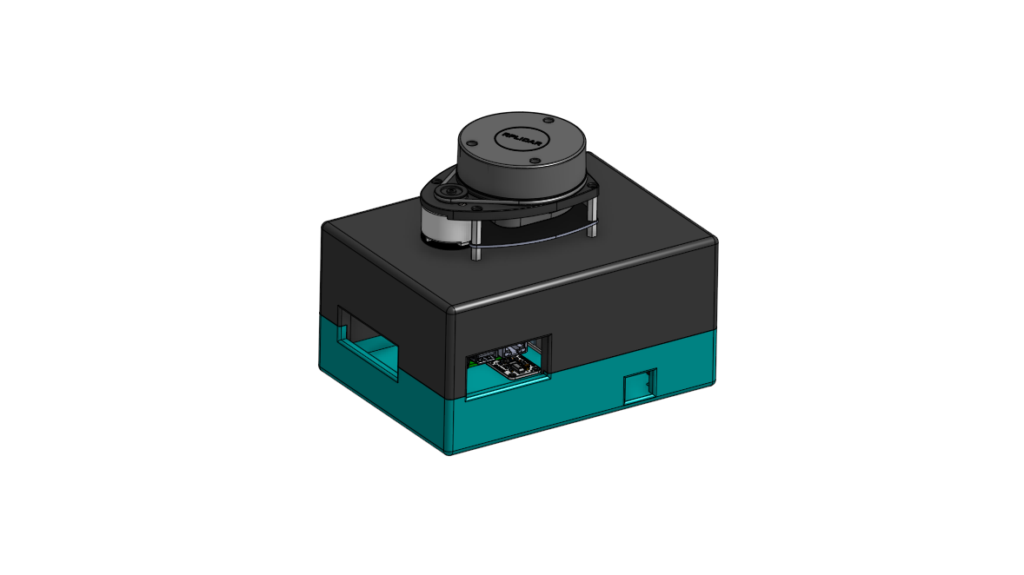
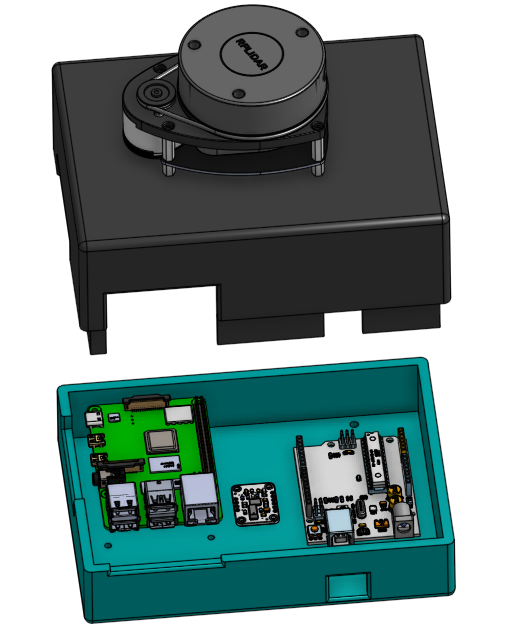
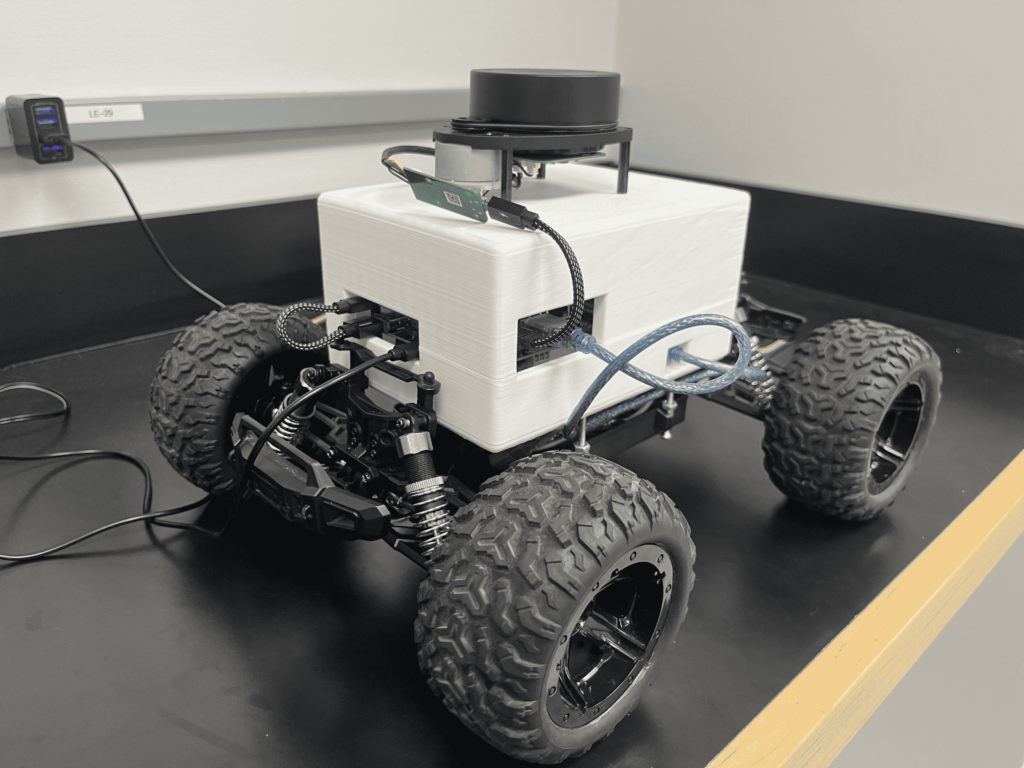
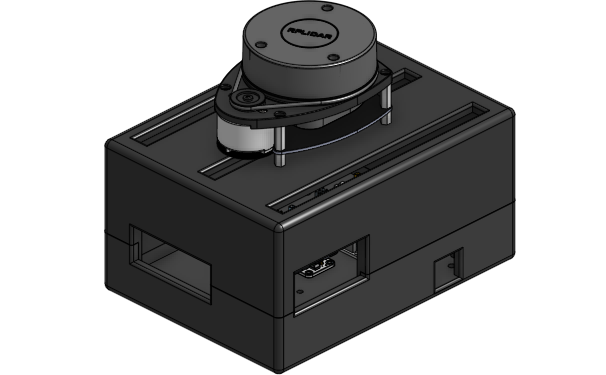
Designed a housing for the hardware used by our autonomous racecar using Onshape. Free STEP files of the Raspberry Pi, LiDAR, IMU, and Arduino were found online to better help the design process. The completed design was printed on an Elegoo Neptune 4 Pro 3D printer.
11/16/25
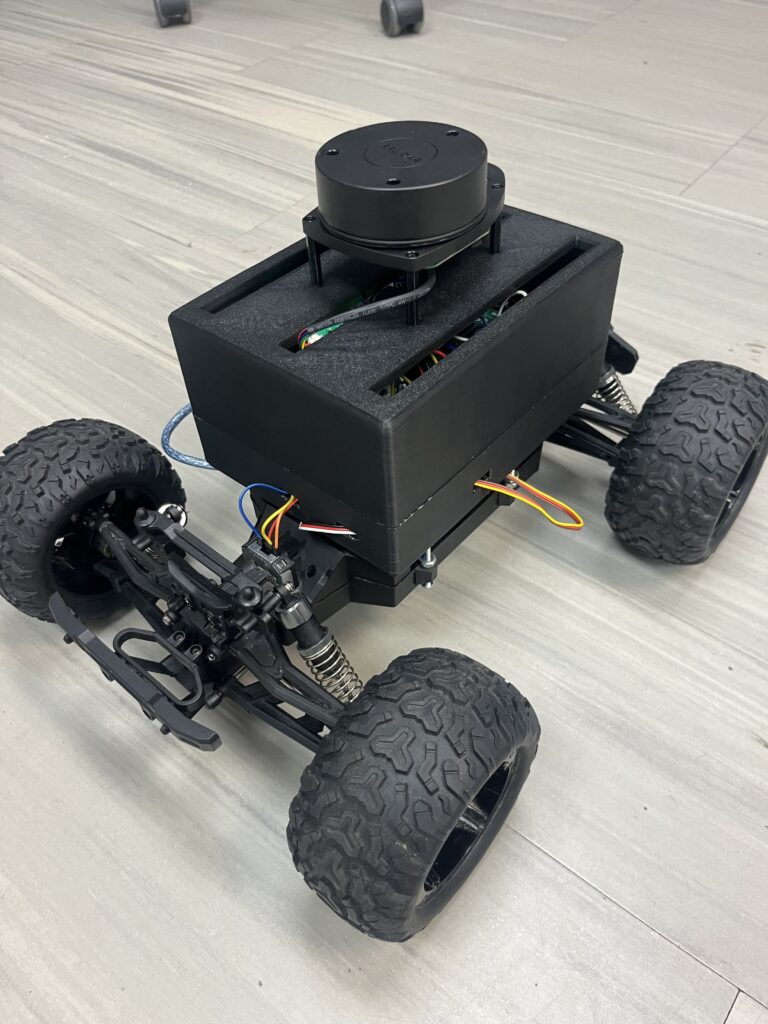
Redesigned the housing in Onshape to include heat vents to avoid any build up of heat could occur. Took this opportunity to reprint the housing in black rather than white to better match the rest of the car.
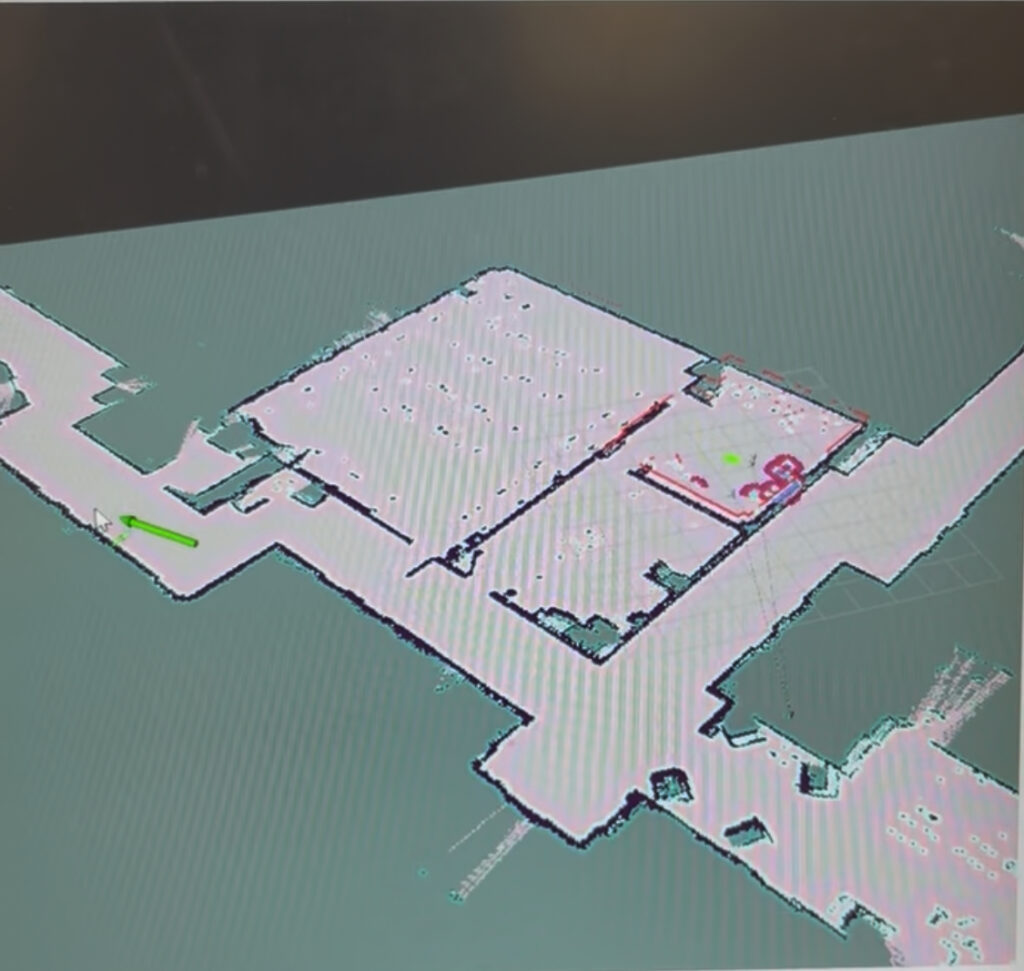
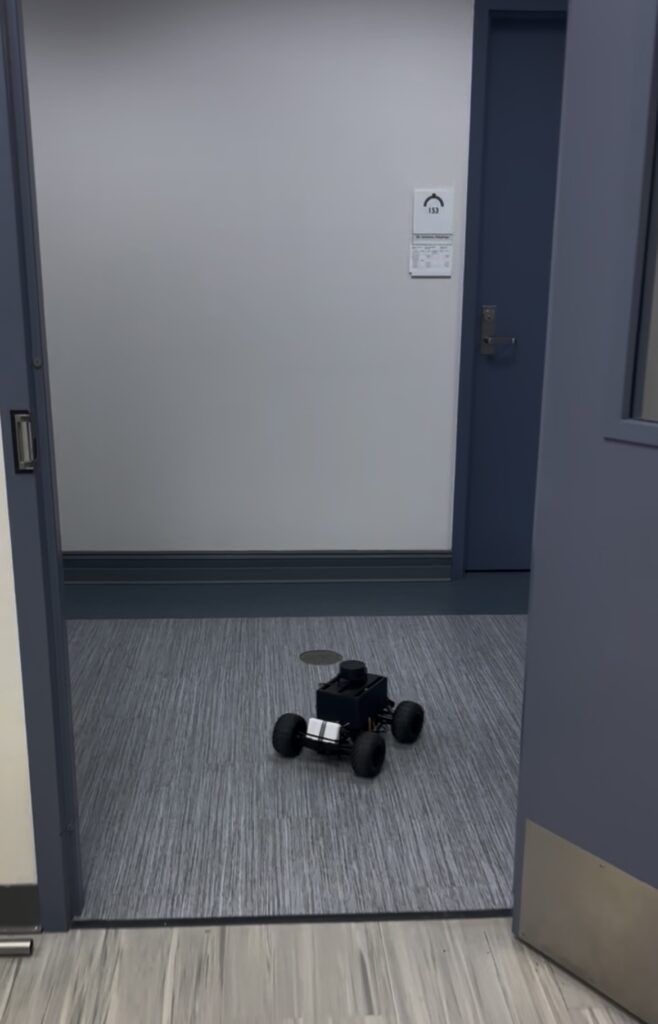
11/26/25
Successfully implemented autonomous navigation into an RC car using a Raspberry Pi to process data from a LiDAR, IMU, and wheel encoder, and an Arduino to run the motor commands given from the Pi. The car can now fully navigate unknown environments while simultaneously avoiding any obstacles in it’s way.