

The final prototype can be seen above. It incorporates two air pumps, one for inflation and one for deflation. There are four force sensing resistors (FSR), one in each bladder compartment. This helps the Arduino know when maximum and resting pressures have been reached. There are also four conductive stretch sensors which monitor swelling in both left and right calf and ankle.
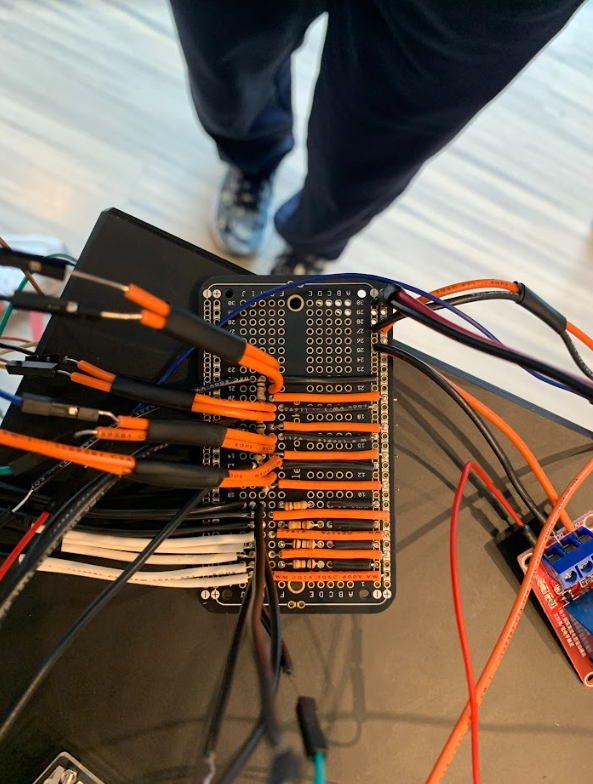
All wires from the sensors lead back to the microcontroller and custom protoboard which is shown below:
The motors themselves were powered by a dual motor driver and an 88.8 W-h battery. The motor driver allows the Arduino to send signals to both pumps individually. The final diagram with a component list can be seen below:

- Motor Driver
- Mini Diaphragm Pump
- Power Relay
- Air Valve
- Arduino Mega
- FSR Sensors
- Stretch Sensor Leads