Hello Everyone! It has been a long time since the last post so let me fill you in on the progress that has been made. First, our Design Specialist, Phil has finished manufacturing the new drop weight. Not only is the height of the dropper platform adjustable but the whole system can be taken apart into two items for ease of transportation.

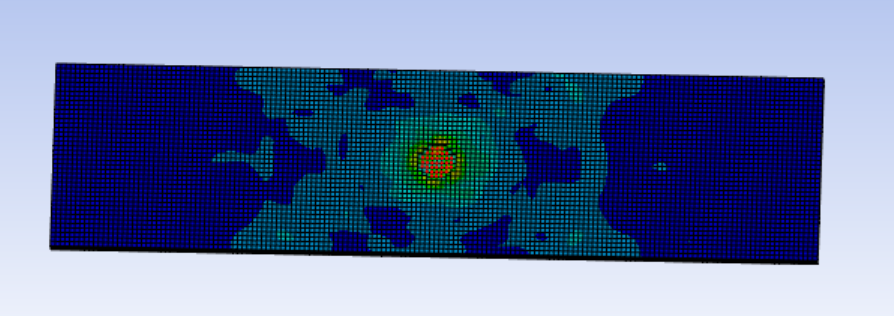
Our Simulation Analyst, Melissa, has been performing a wide series of model analysis using ANSYS to compare with the experimental data recorded from testing.

As for myself, I have been hard at work performing a wide variety of tests to prove the validity of this machine. The X and Y plane recording still require more work to be done as the sampling rate for the camera recording that surface might be too small. This has resulted in data significantly smaller than expected. However, the Z-Deformation recording has been providing very promising results so far. When compared to Melissa’s numerical models, our Z deformation tests have a 19.3% difference with a standard deviation of 0.035in from a sample size of 4 tests.

This has been an incredibly successful year, and hopefully the LVIT will continue to grow and improve over time. Thank you all for following us! Please enjoy some GIFs produced after testing!