Project Description
The 3D Printed Powered Exoskeleton for Human Hand will aim to assist users with weakened grip strength and instability in their hand(s) and allow them to complete daily tasks that they otherwise couldn’t. The target audience for this project is those with Parkinson’s disease who unfortunately tend to have weakened limbs and instability that could limit them from doing things like opening a door or pouring a glass of water. The design for this hand will consist of a soft robotic exomusculature glove with a pneumatic tubing system that will assist the user in closing their hand as well as holding and moving objects.
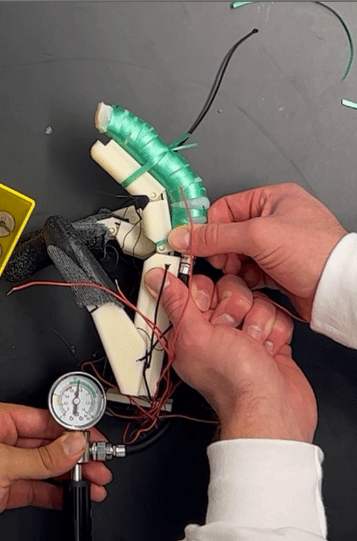
As seen above the team has made significant progress towards assembling the final hand design. Pneumatic actuators have been created using Ecoflex 00-30 silicone and tested for various pressures. Over the course of the semester the team is looking to finalize this design and begin implementing it to function on a human hand.