Harmonic Motion
• FPGA-driven stepper synth
• FPGA-driven stepper synth
Overview
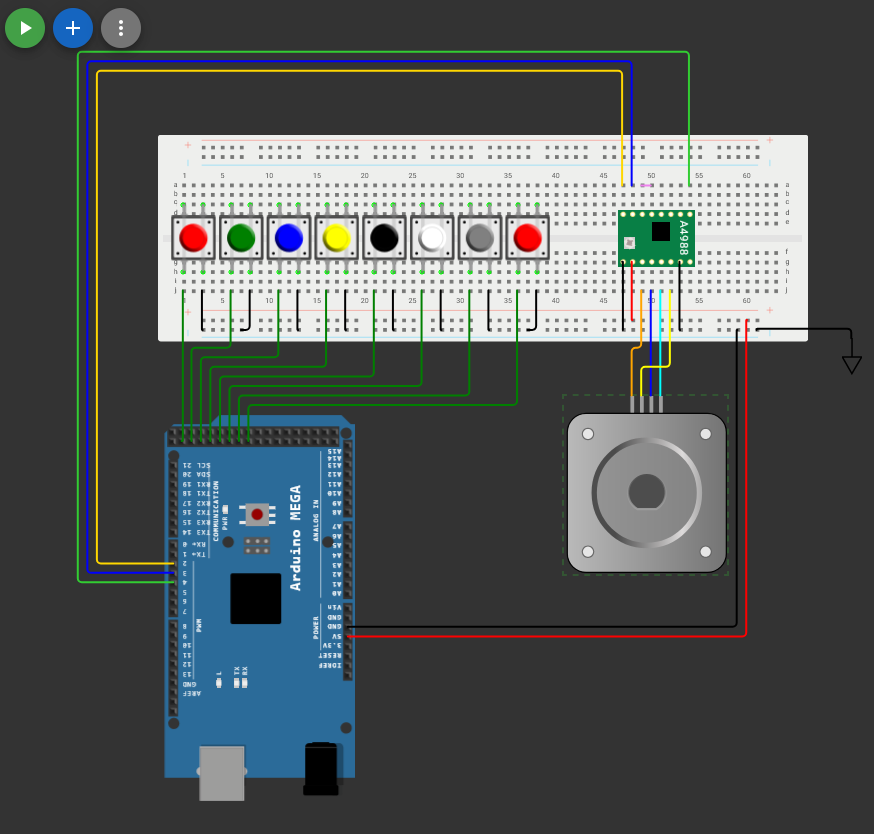
Project converting precise motion into musical tone. Timing and motor control on an FPGA;
input, interface, and I/O on a microcontroller.
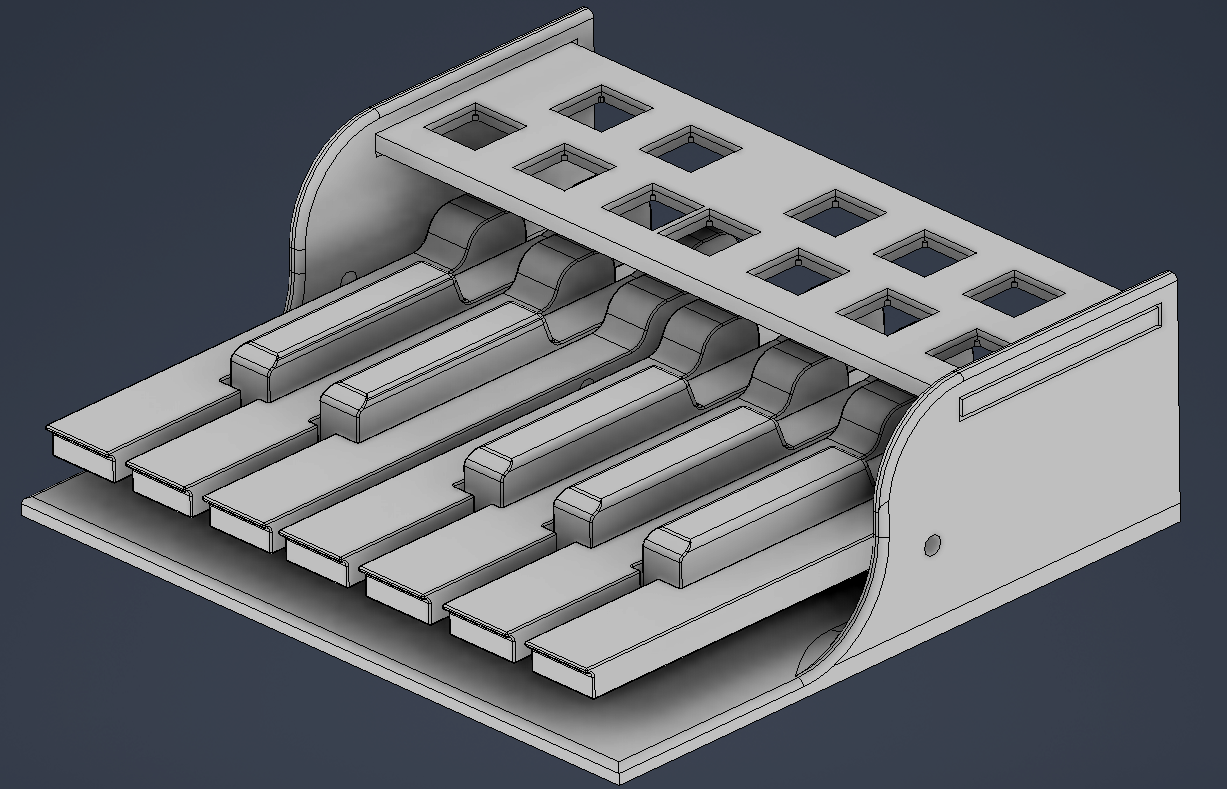
- Goals: 5 “voices” across 5 motors; microstepping sound amplification with resonance chamber development
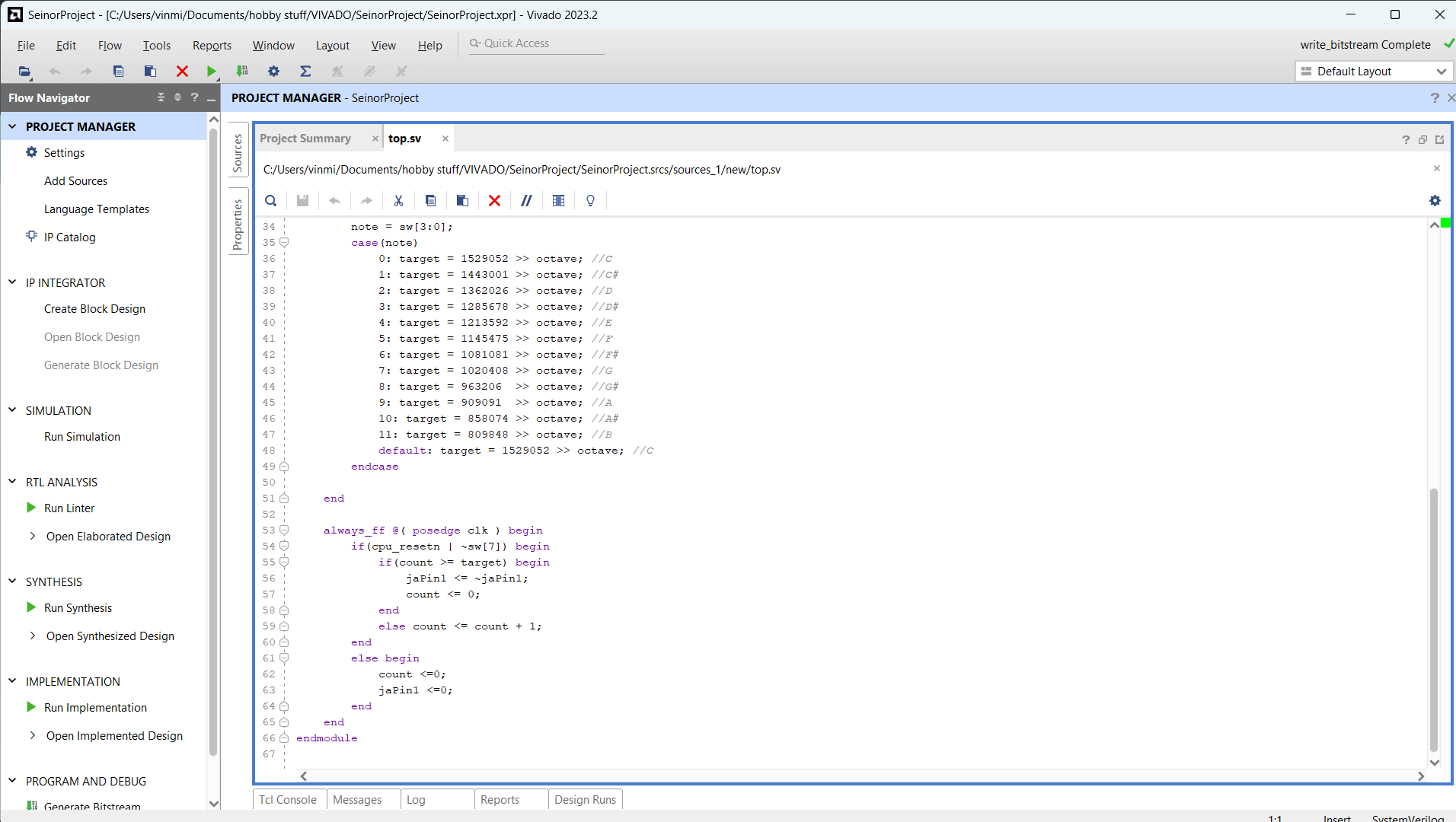
- Tech: Verilog modules, UART and MIDI protocols, C++ firmware
- Status:
FPGA single-motor control via on-board switches and Arduino-based key input driving a single
motor are working; integration of MIDI and multi-voice expansion is in progress.

Small Code Sample
// Ramp setup
void serviceRamps() {
unsigned long now = millis();
for (int i = 0; i < NUM_MOTORS; i++) {
if (!motors[i].running) continue;
if (motors[i].currentNote < 0) continue;
if (motors[i].currentFreq >= motors[i].targetFreq) continue;
if (now - motors[i].rampStartMS >= RAMP_TICK_MS) {
motors[i].rampStartMS = now;
motors[i].currentFreq += FREQ_RAMP_STEP;
if (motors[i].currentFreq > motors[i].targetFreq) {
motors[i].currentFreq = motors[i].targetFreq;
}
if (motors[i].currentFreq > 0) {
motors[i].stepPeriodUs = 1000000UL / motors[i].currentFreq;
} else {
motors[i].stepPeriodUs = 0;
}
}
}
}
// Dealing with microstepping and more ramping
void serviceSteps() {
unsigned long nowUs = micros();
for (int i = 0; i < NUM_MOTORS; i++) {
if (!motors[i].running) continue;
if (motors[i].stepPeriodUs == 0) continue;
if ((long)(nowUs - motors[i].nextStepUs) >= 0) {
motors[i].stepLevel = !motors[i].stepLevel;
digitalWrite(STEP_PINS[i], motors[i].stepLevel);
unsigned long halfPeriod = motors[i].stepPeriodUs / 2;
motors[i].nextStepUs = nowUs + halfPeriod;
}
}
}
// Clearing motor when key is released
void releaseKeyFromMotors(int keyIndex) {
for (int i = 0; i < NUM_MOTORS; i++) {
if (motors[i].assignedKey == keyIndex) {
stopMotor(i);
}
}
}
Gantt Chart as of 11/14/25
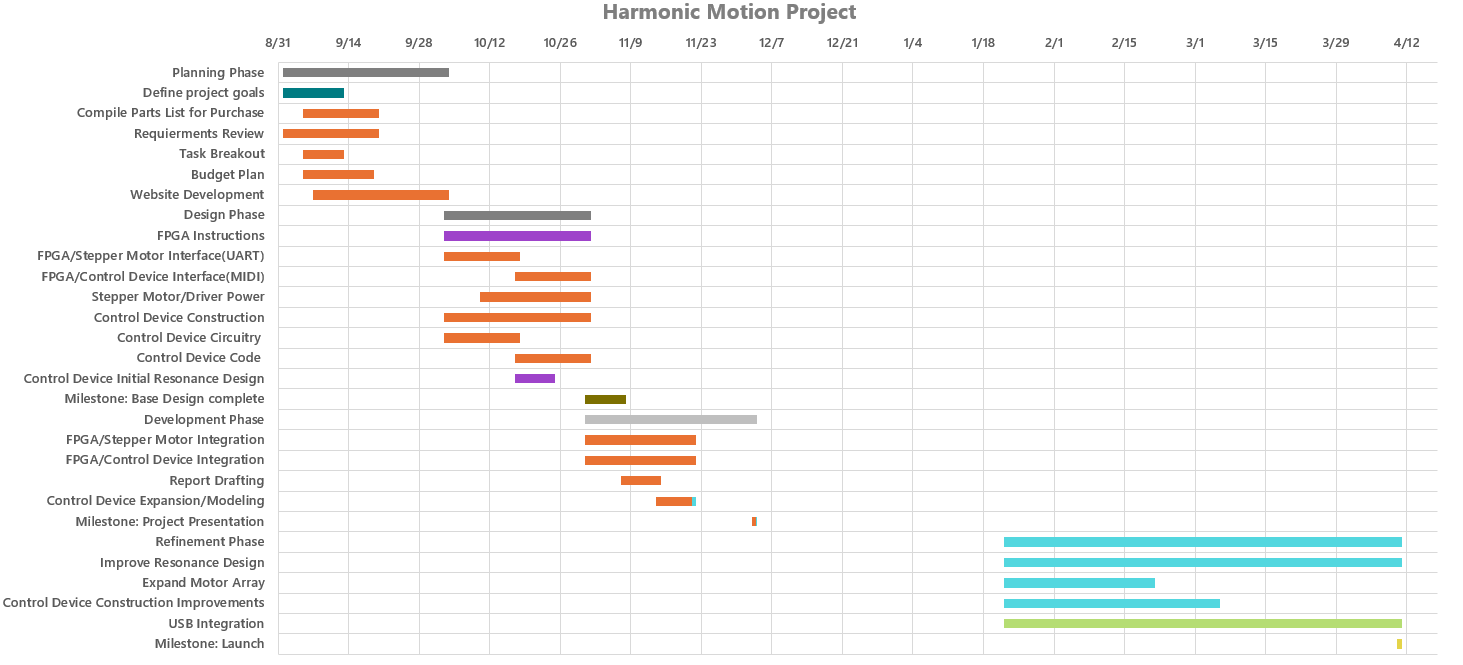
Excel snapshot of project Gantt chart (schedule and milestones).
Team Members

Ben Hopper
Project Lead / Embedded Systems
MIDI encode/decode logic, Arduino firmware, hardware integration, and overall coordination.

Vincent Perlowin
FPGA Specialist
FPGA integration, pulse engines, Verilog modules, and MIDI decoding logic.

Dr. Kim
Faculty Advisor
Guides technical decisions, project scope, and academic direction.