We meet our advisor and discuss a scheduled meeting that all of us can attend.
Discuss a demo to present for the end of the fall semester, where we will have two NAO robots, one being able to kick the ball and the other as a goalie to block the ball.
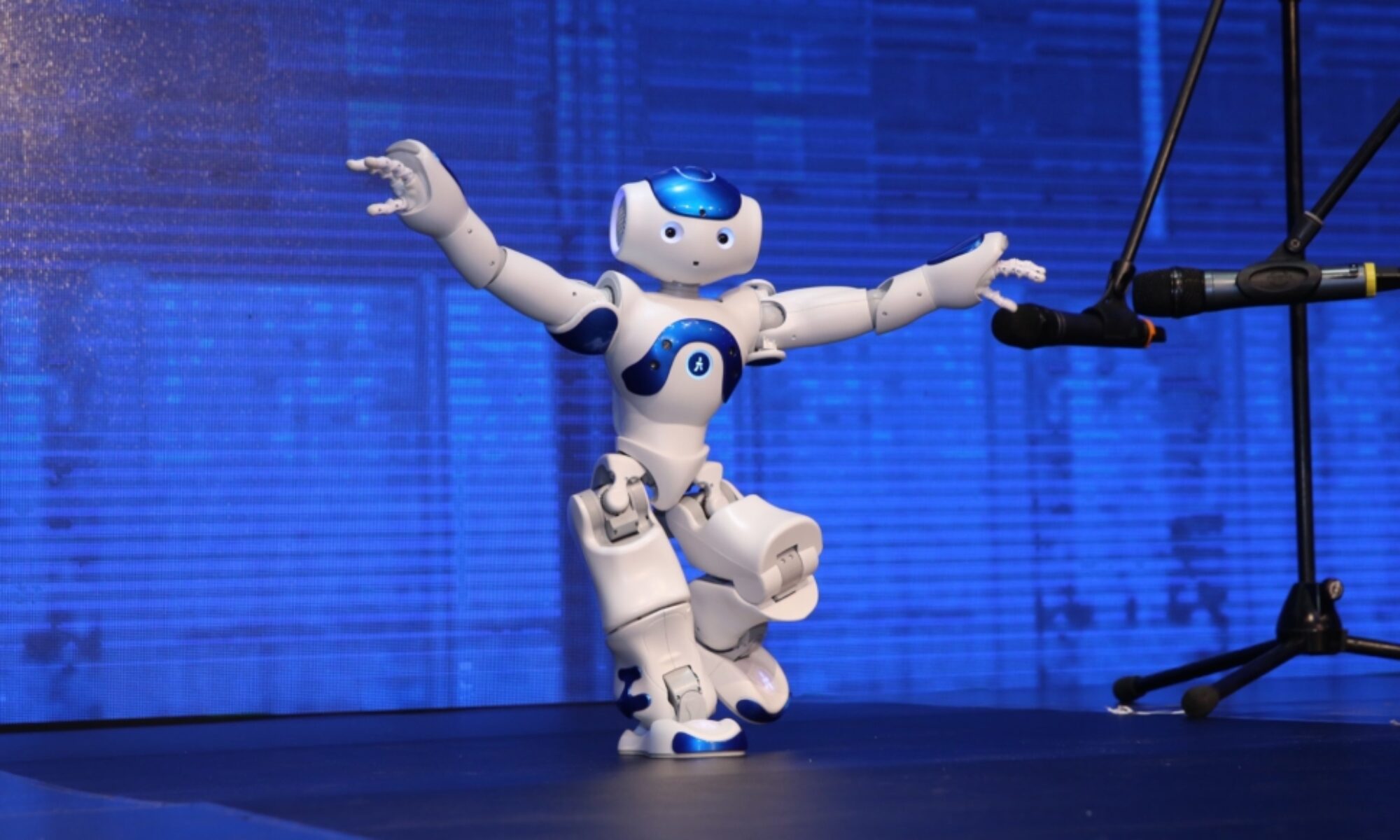
For the NAO robot, we had to learn about the robot itself and watch tutorials, and understand the software, which is Choregraphe, for operating it.
Drawing a diagram of the ramp to have a draft of what it will look like, including the materials needed.
October:
Desinging a block code for the NAO robot to detect a red ball to kick it.
Determining the ramp height and length based on data that was collected and gathered from various trials to determine the best slope needed to provide the ball the motion to roll down, but at a speed for the NAO robot to detect and kick it on time.
Numerous attempts to upload code to the NAO robot have not been successful, due to it going into a boot cycle
Changing the batteries with a different NAO robot in the lab to see any changes in the boot cycle. There was improvement for a brief moment, but it proceeded to continue with the boot cycle.
Technical Support is nonexistent due to the company not existing, and all resources are decades old, with the NAO robot also being outdated. So any tampering with the NAO robot to resolve the issue was a concern for the team due to being behind schedule.
Meeting the team and our advisor to stay on schedule, we had to scrap the main demo of having 2 NAO robots going against each other to just one being able to kick the ball from the ramp. But also getting 2 pre-built robotic cars from a previous project our advisor worked on in the past. The updated demo would include the 2 pre-built robotic cars to detect the ball and push it into the goal
The pre-built robot had an Arduino board, an HC-SR04 Ultrasonic sensor, and an L298N motor driver. With these components, we had to make sure the wires that we were connected at still intact and set correctly for our demo. Once we made sure the wires were connected correctly, we did a small test, such as making sure the motors worked and the Ultrasonic sensor could detect its surroundings.
November:
We construct a code to have the new robots to detect the red ball and move forward to make a goal. When testing it, the task was successful. The next step is to see how it will respond to the ball rolling down from the ramp.
The ramp is fully constructed, with a switch circuit being attached
The NAO robot can provide a kicking motion through an animation process instead of coding, where the action of kicking is taken one frame at a time. The only obstacle is to provide the timing for the NAO robot to detect the ball and then activate the animation the moment the ball is aligned with the NAO robot’s foot.
The new robot can successfully detect the ball coming down from the ramp and hit to the goal. The second robot will be a goalie to hit the ball back.
December:
Presented our project to students and faculty
Submitted our lab report
February:
We looked into upgrading the Arduino robot with a new board and added a component. The board will be replaced with a Raspberry Pi 4 board for better processing and getting the Raspberry Camera Module 3 to recognize the soccer ball. Which we purchased and have been able to ship and arrive at the end of the month
Mr. Steel provided files of the CAD design of the robot’s chassis, which will be reprinted due to the age of the parts, and also to make modifications for the camera to be held and add new components to enable the ball to be kicked.
The framework of the ramp was built with wooden plywood supplied by Mr. Zanetti