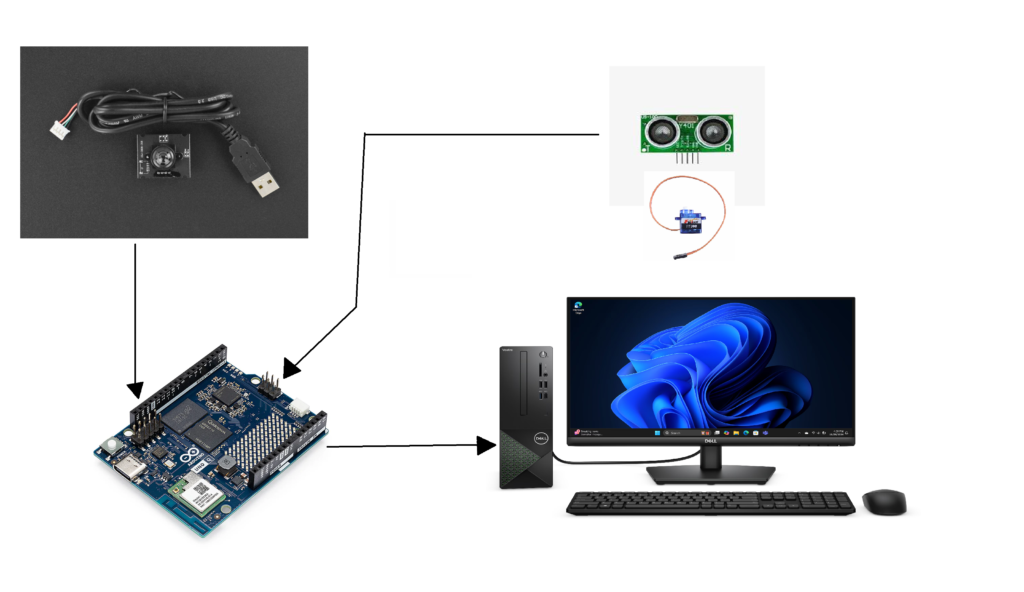
Below is a basic layout of what our final design is.
Our plan is to Mount the camera to the top of a monitor in front of the user while an ultrasonic sensor is setup on a servo on the desk near their hand. These two will be wired into the UNO Q and said board will, in turn, control the computer input.
The ultrasonic sensor and servo will act together as an ultrasonic sonar which will be used in place of a mouse. They will allow the user to move their cursor in the x and y direction based on where their finger/hand is in front of the sensor as it pans back and forth. These readings will be achieved by determining the servos degree of rotation and the distance by the sensor’s reading.
The camera will use neural network and/or AI training to identify more complex hand signals given by the user. This input is used to complete tasks like selection, forward, back, etc. or other actions which cannot easily be conveyed through a basic sensor. This will allow us to train/program the camera to recognize unique signals and even build in functions like “home” “favorites” etc. Similar to dedicated buttons on a TV remote or keyboard.