
For this option we plan to use multiple ultrasonic sensors to detect which direction the hand moves in. The idea behind this option is two-fold; firstly, it is the cheapest option as ultrasonic sensors are far cheaper than cameras and work faster as well. Secondly, the ultrasonic sensors will be faster and easier to work with since they only preform a single action, that being sending out sound pulses to detect distance.
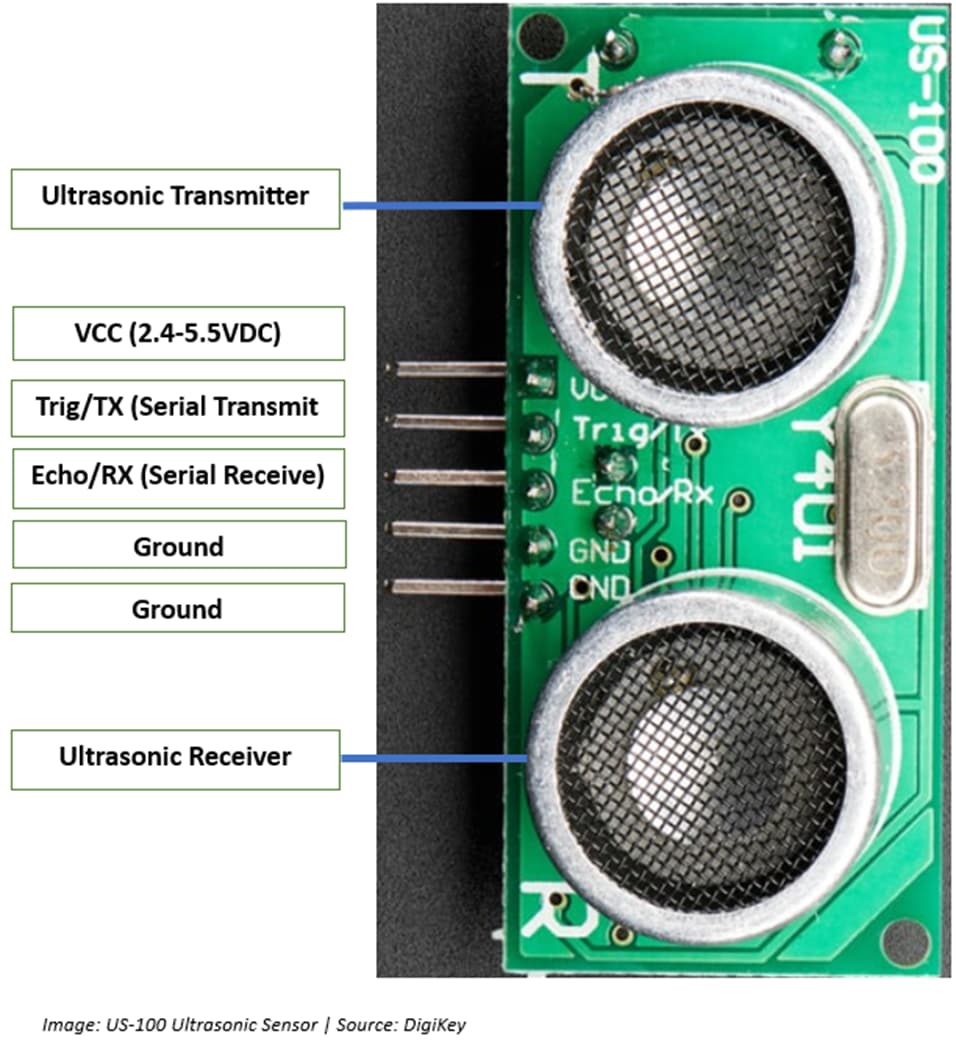
The sensors we’ll be using are the US-100 Ultrasonic Distance Sensor. This is slightly different than the standard one, the HC-SR04, one might see used for this application or with Arduinos and raspberry pi boards like we are using. This is because the US-100 sensors have an extra pin and toggleable functionality which allows us to use them in serial or manual(trigger) modes. The difference here is that the serial mode preforms all the calculations for distance on the sensor itself which frees up more space on the microcontroller. This means that we have more processing power on the microcontroller to interpret the data and decide which hand signal is shown. But this also allows us to change the functionality back to manual mode when needed.