Resistance Glove with the H.O.M.E. App
The current Resistance Glove has the finger caps to prevent the fabric from pulling on the hand. Guide and end clips are sewn onto the back of the glove for rubber bands to be attached for resistance training.
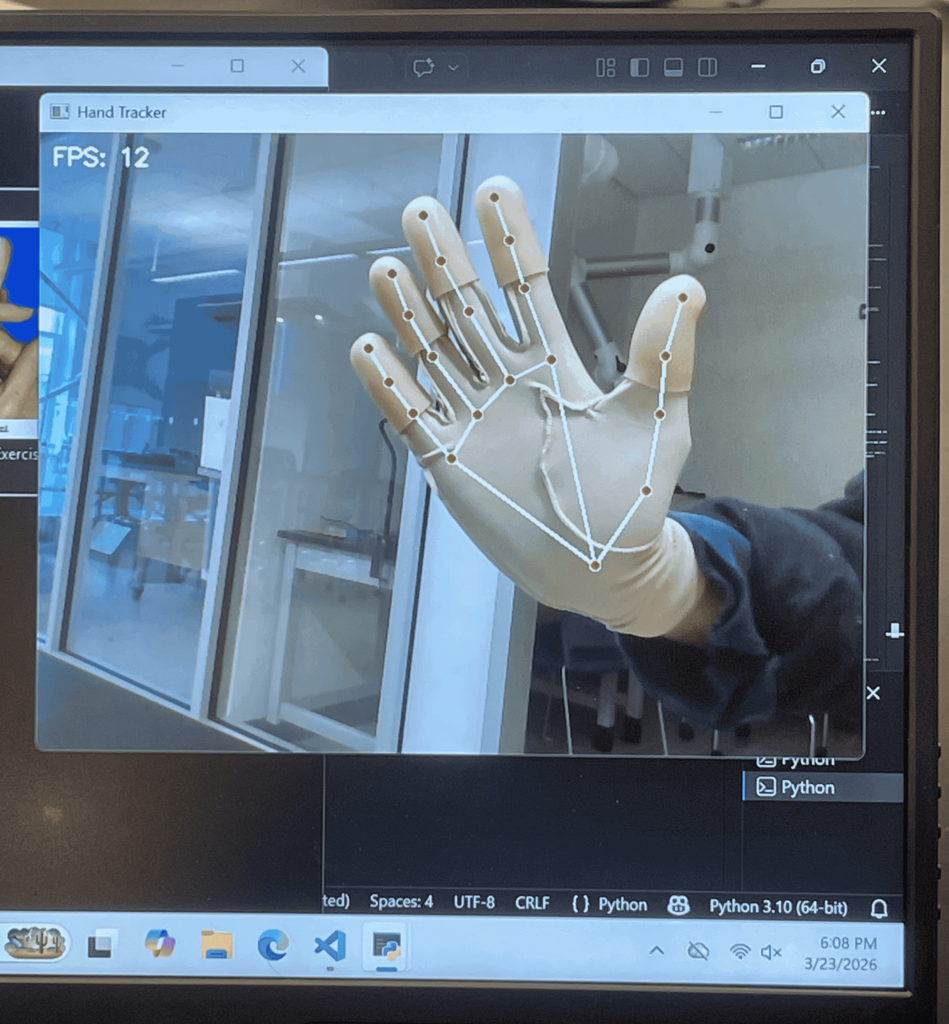
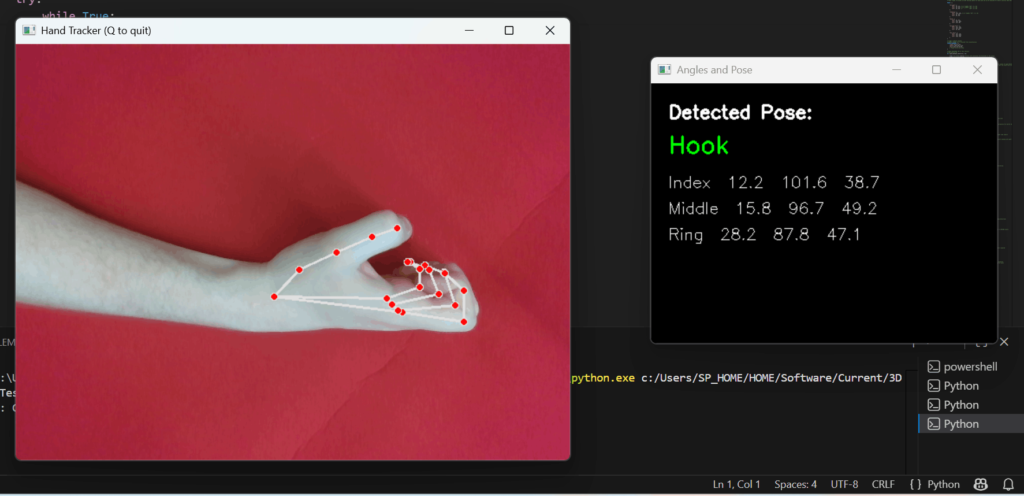
The glove being used for the resistant component of the device can be identified by Google’s Mediapipe Hand landmarkers, and show angles. Pose detection still needs corrections.


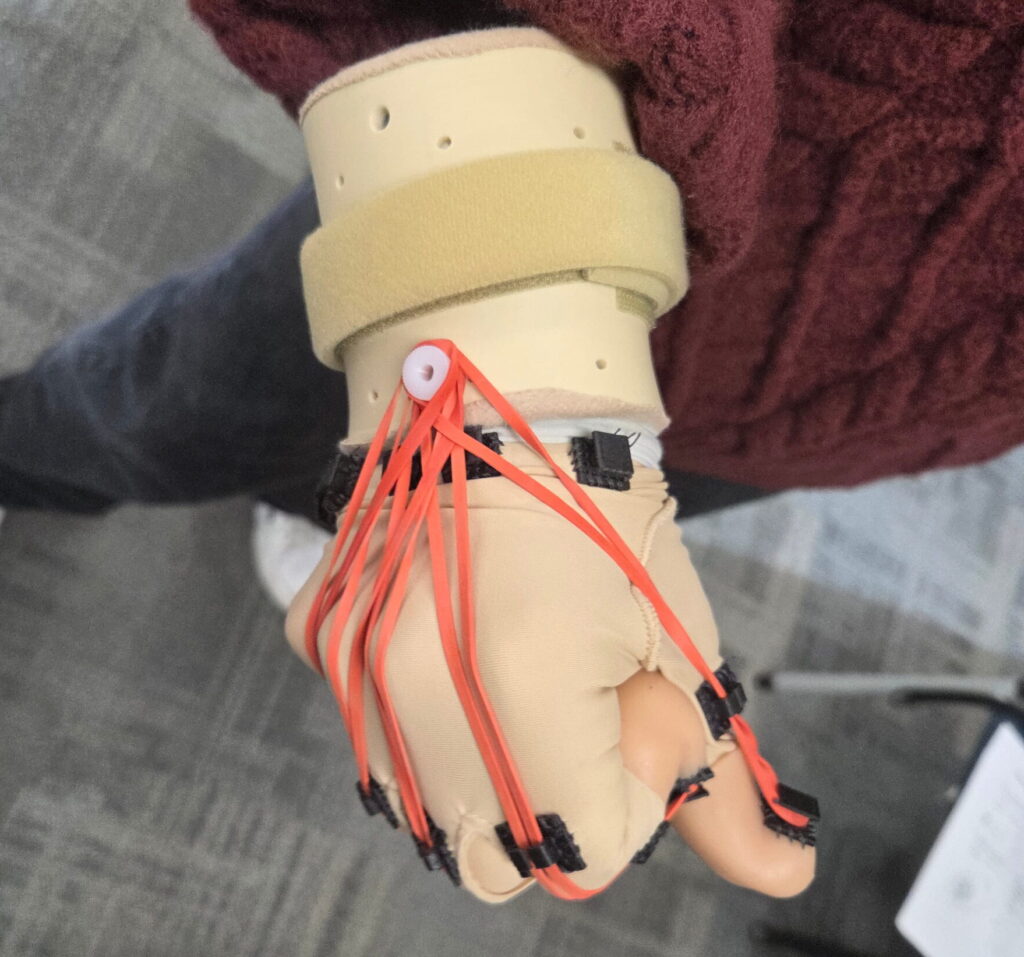
The resistance glove above, shows a wrist component to act as a rigid boundary for the rubber bands. Special thanks to Ali at Mercer-Bucks Orthopedics (See Meet The Team). Additional fixed points were added, not shown here.
Tendon Gliding Pose Detection
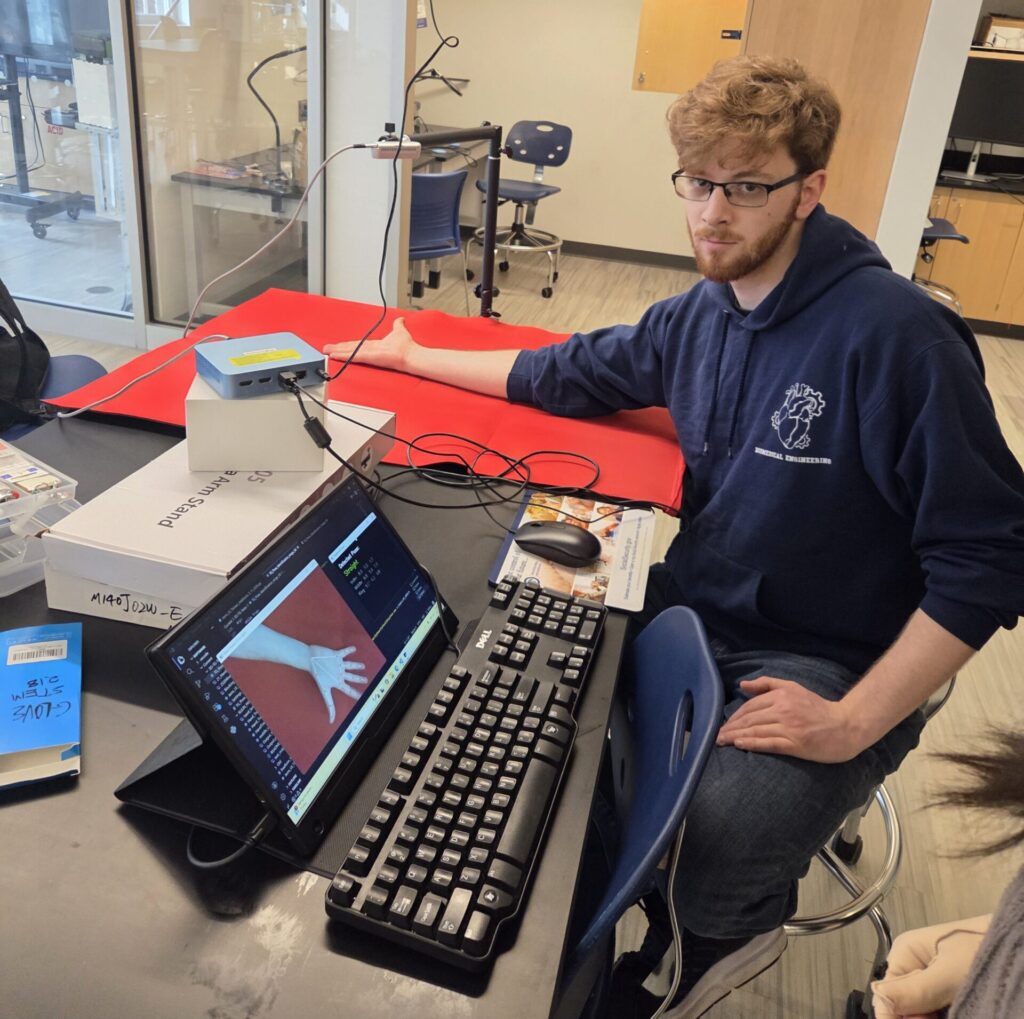
The setup of the prototype includes a monitor, Peladn Mini PC, and the camera with a stand. A non reflective (red) background is used in testing and modifying the script prior to camera setting adjustments.
The H.O.M.E. application correctly identifies the hook position, one of the five poses in the Tendon Gliding Exercise.
Patient and Clinician Website Dashboard

Complete setup for the H.O.M.E. Device. With the Intel RealSense Depth camera parallel to the table and the user interface view shown on the monitor.
The updated UI, now organized as a website allows either clinician or patient login. The clinician would create an account for their patient with general information, and their prescribed PT exercises. The patient would login, see the exercises they need to perform, and their progress would be tracked for them and their physical/occupational therapist to see.