H.O.M.E. Hand Orthopedic Motion Evaluator
The final design solution includes the integration of Motion Capture using Google’s Media Pipe Hand Landmarkers Machine Learning (ML) model with an optional wearable resistance mechanism for increased exercise difficulty. Exercises will be performed within a frame to provide consistent background and lighting for each exercise session. Feedback on form will be determined based on the ML reported indexes compared to therapeutic and safety thresholds determined by the patient’s physical therapist. Below is a video with implemented pixel coordinates.
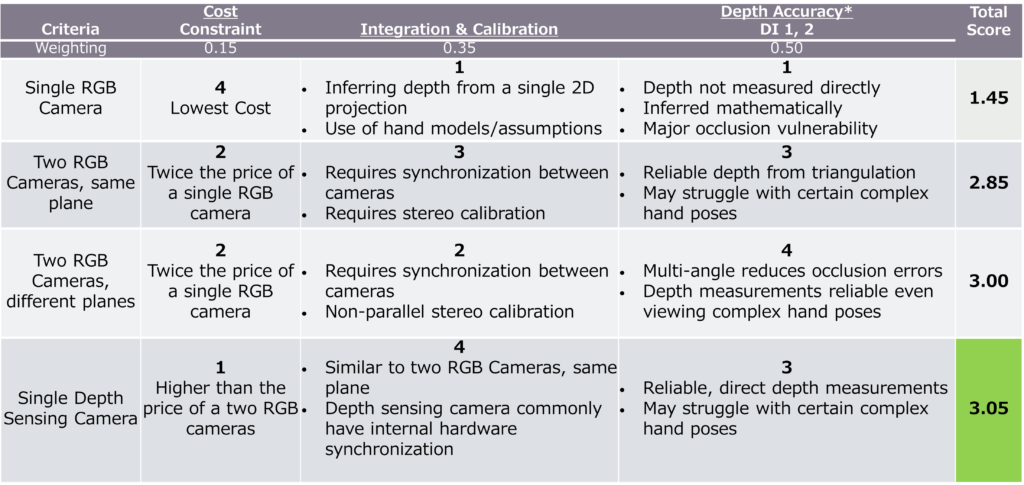
Camera Selection
The camera setup was decided based on the criteria shown below.
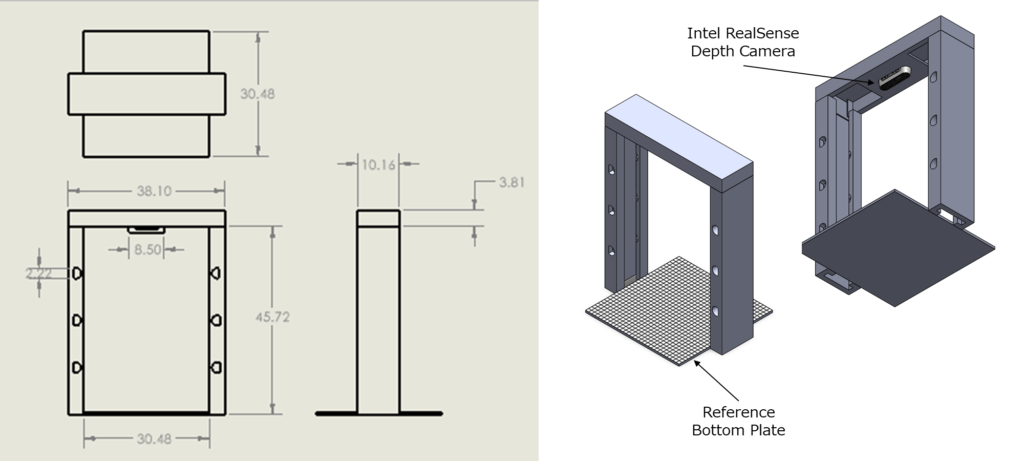
With the selection of a single depth sensing camera, the position and lighting will then be standardized. The framing (shown below) will allow the camera streaming to be positioned above the hand within a designated area to perform exercises, above the reference bottom, plate.
Computational Power
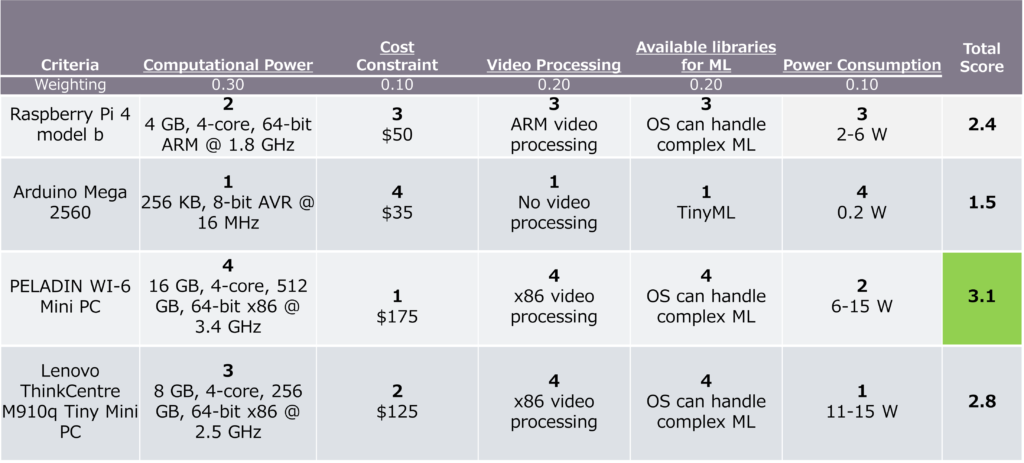
The device needs to process 3 video streams and calculate the appropriate joint velocities to provide the appropriate feedback as defined in Design Inputs 1 & 2. The criteria below were considered, resulting in the use of the PELADN WI-6 Mini PC.

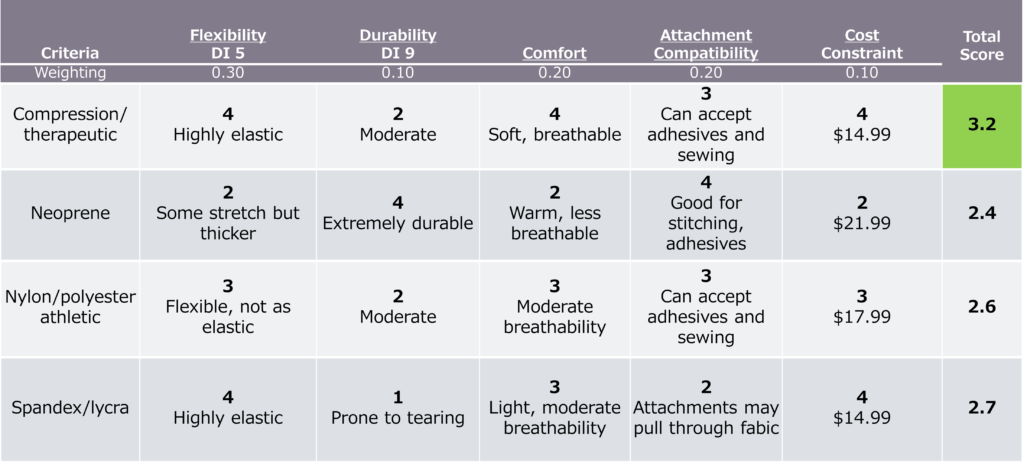
Resistance Mechanism
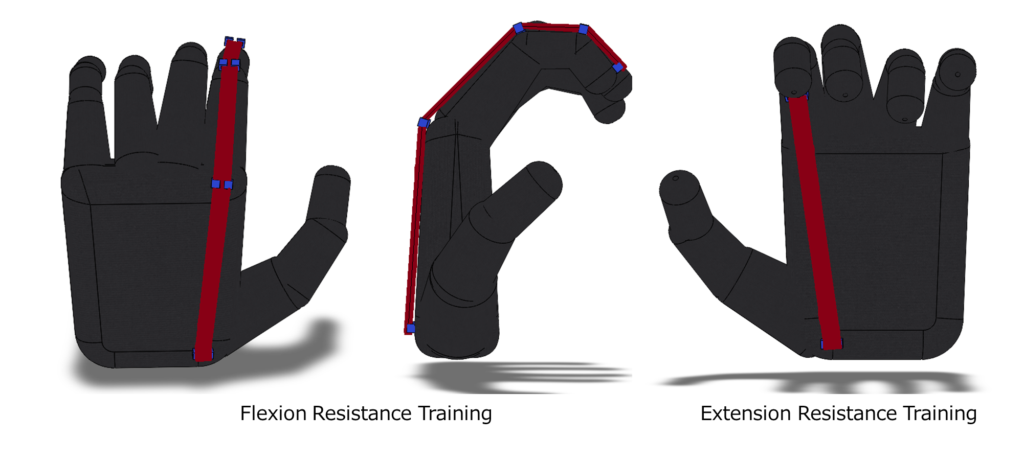
Below is a conceptual diagram of a single band (red) in flexion and extension orientation with blue joint guides providing
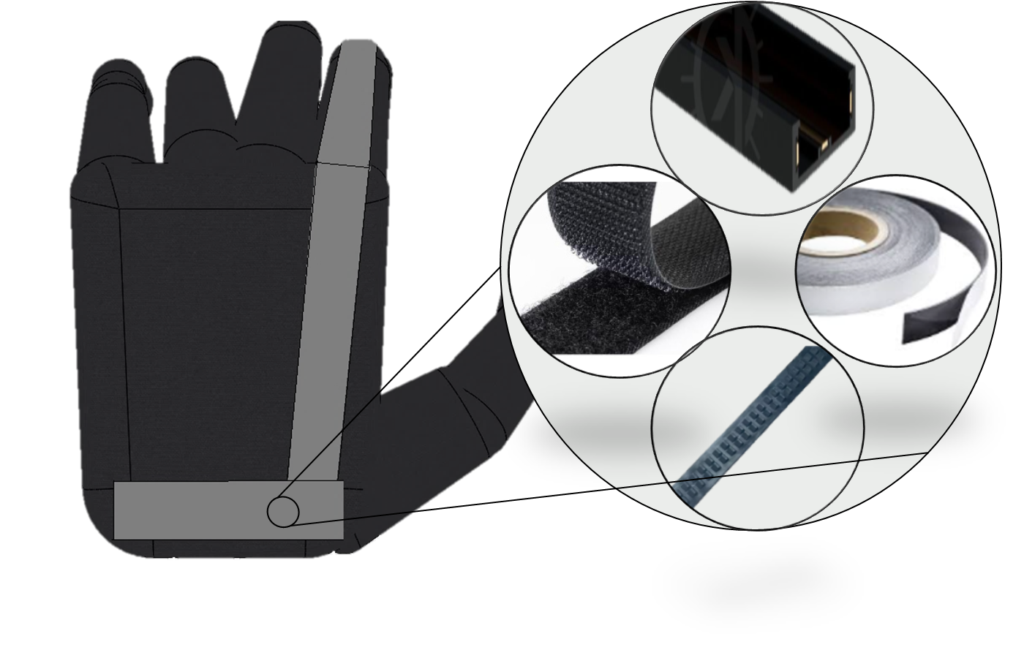
The type of band to provide following specification requirements noted in Design Input 3 has not be selected, but multiple options are available, shown below. The final selection will be based on linear tensile testing to determine stiffness and force output potential, as well as individual simulation on a hand model.

Resistance tubing and bands (top colorful options) have known resistance force, while synthetic elastic bands are simple and cost effective for a prototype.
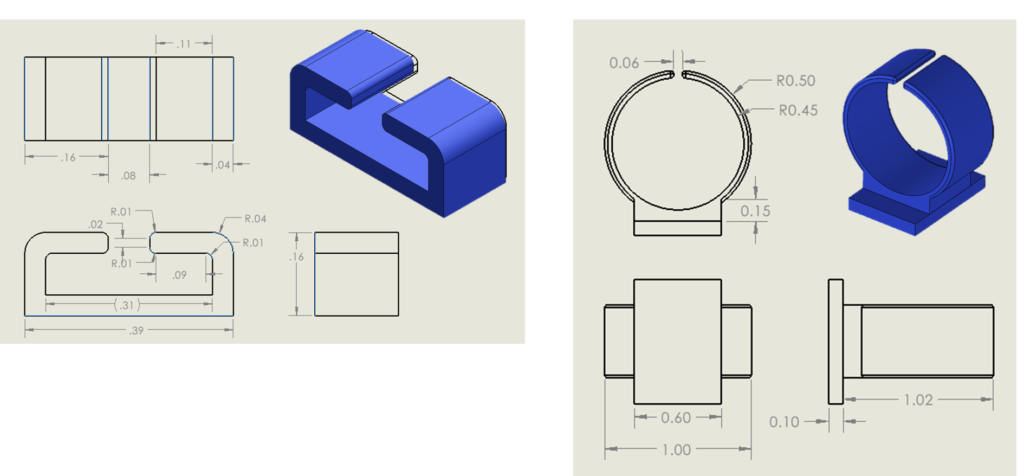
Testing the strength and force output of the bands will require guides, as shown in blue on the hand model, to prevent the bands from slipping off the finger and ensuring their location stays parallel to the tendons that require extra training. Two guides are shown below as options for thicker rectangular bands (left) and tubing or rubber/synthetic bands (right). These will be placed at each finger joint, tip of fingers, and at the wrist for flexion exercises. Similarly guides will be used for extension exercises, excluding finger joint locations.
To meet design input 5, accommodating a range of hand sizes, an adjustable mechanism needs to be implemented to move the location of the guides, ensuring they are positioned at the joints.
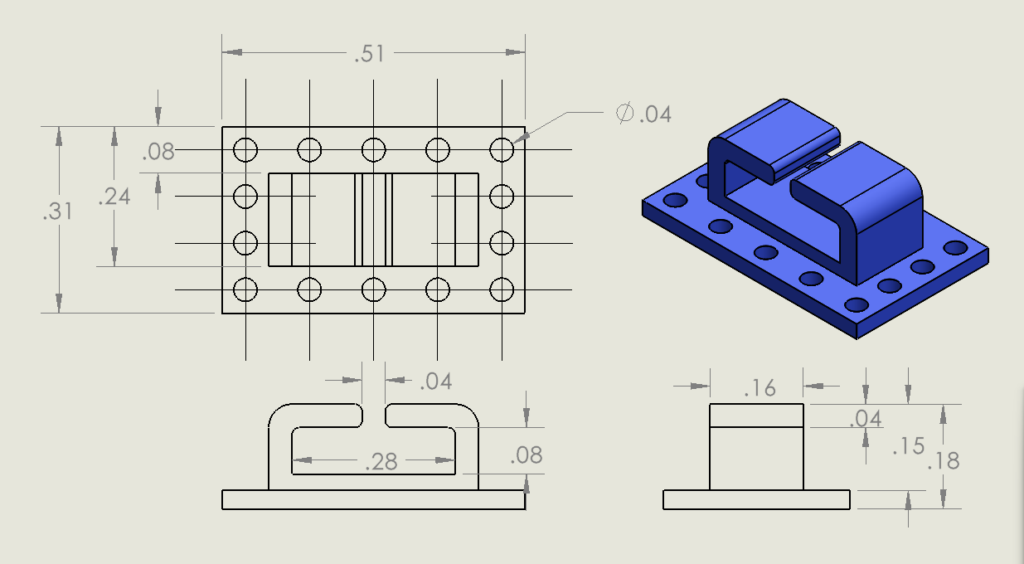
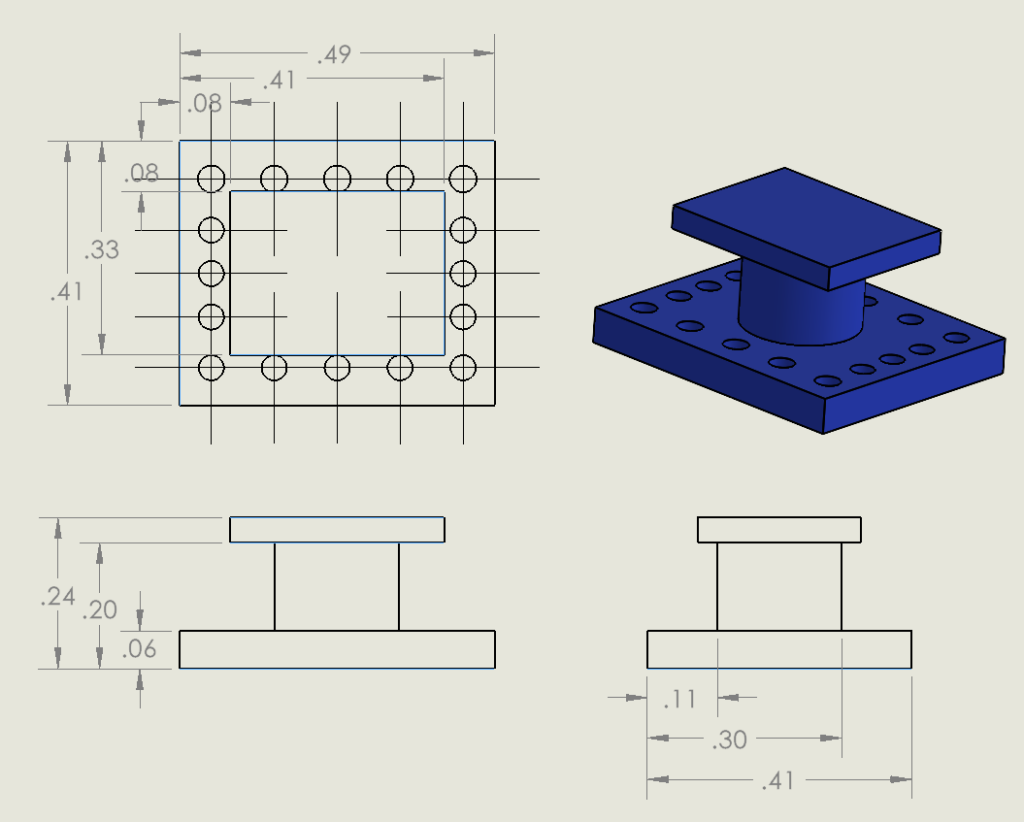
Above are the updated rectangular clips to be used with simple rubber bands. Holes are added to allow the clips to be sewn onto a compression glove. The right clip will be placed at each finger tip, and the left along the finger joints acting as guides.
Options being considered include velcro or dual-lock strips, magnetic strips, a sliding track, and a bidirectional linear rachet mechanism along a rack with locking teeth.
The material of this wearable component of the device will be a full or hybrid compressive glove which allows adjustability and therapeutic support during exercises.