Data Gathering
Three potential design solutions were developed with the goal of determining the position of the hand, joints and wrist, in space. The positions will be measured directly and additional data will be calculated and compared to thresholds. This will provide the information needed to determine if the user is doing the rehab exercise correctly.
Motion Capture Approach
This design solution ideally requires no additional material or electronics to wear on the hand, allowing easy tracking of exercises being performed by the user. An open-source machine-learning model (such as Google’s MediaPipe Hand Landmarker) can be used to track 21 points on the hand with imaging overlay (see video below) to determine where the hand is located, allowing the device to calculate linear and angular velocity/acceleration.
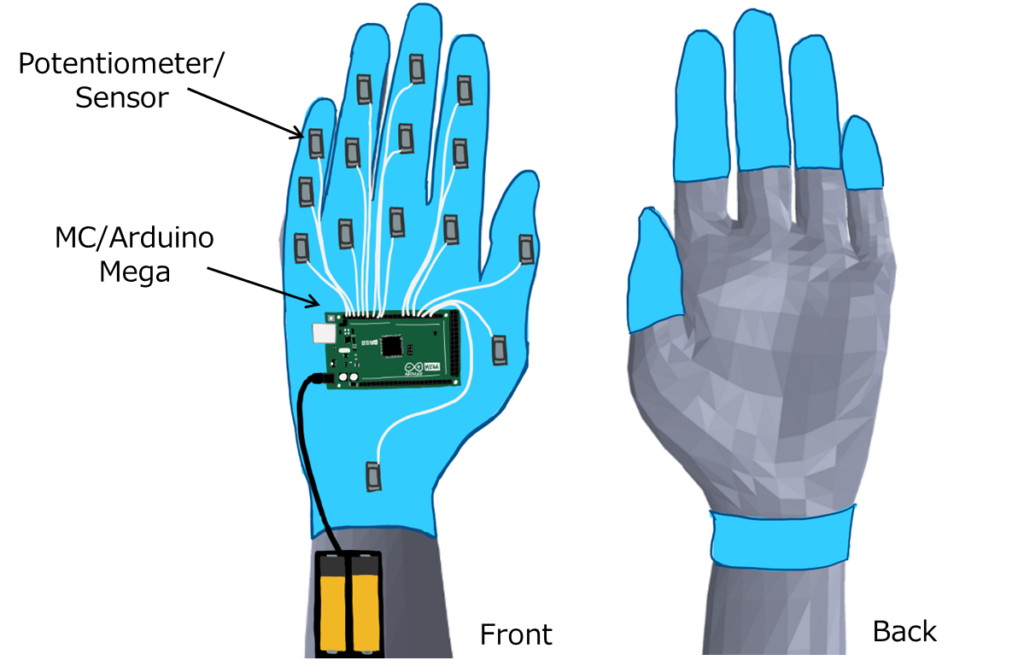
Potentiometer Approach
This design solution is a glove like device which has a potentiometer (or other sensor) at each joint and at the wrist, this requires a larger microcontroller than the other design solutions with at least 15 analog input pins. The position of each joint will be determined by the potentiometers, yet wiring and weight complexity may deter the user’s mobility.
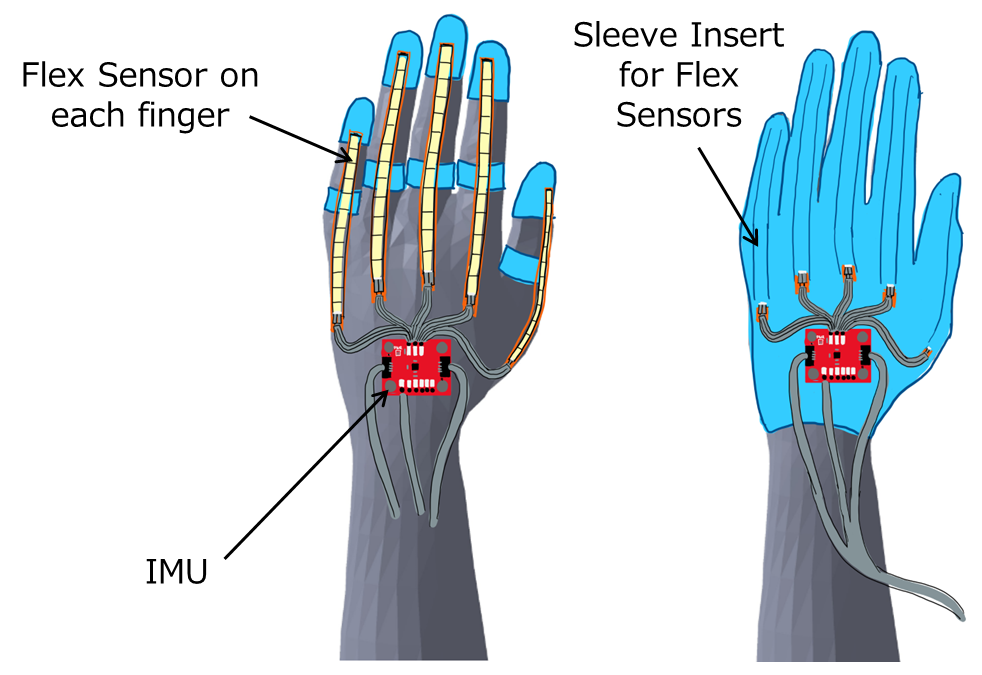
Hybrid Approach
Flex sensors are attached to each finger and an Inertial Measurement Unit (IMU) is on the back of the hand. This design solution would integrate sensors and visual modeling, requiring some kinematic calculations to determine where the fingers are in space.
Resistance
Several design options were discussed early in the design process (see Photo Gallery-September Meetings). These includes Elastic Bands, Cable Driven or Motorized, Pneumatic Actuator(s), and Magnetorheological (MR) Fluid.
A potential design solution is shown below using elastic bands. The design allows for flexion and extension resistance training depending on orientation of the wrist band.
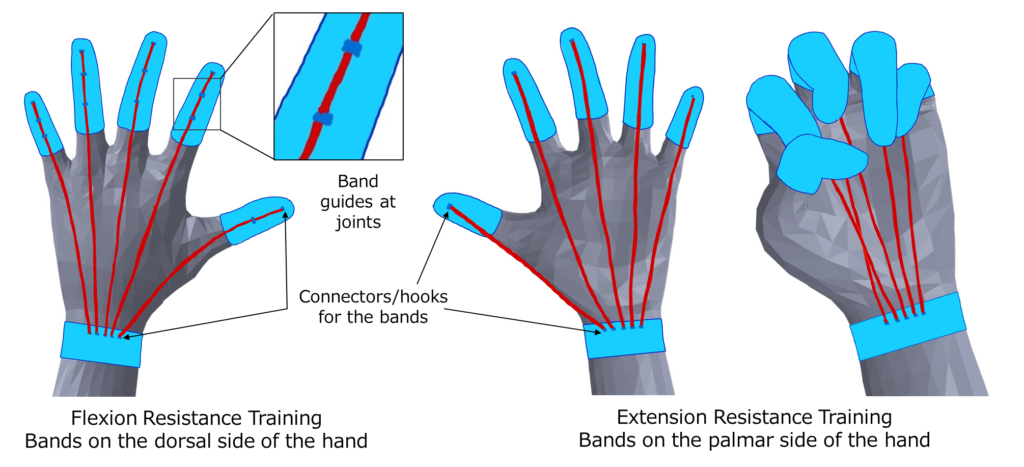
Other resistance options different from elastic bands have increased complexity and concerns about weight and safety.