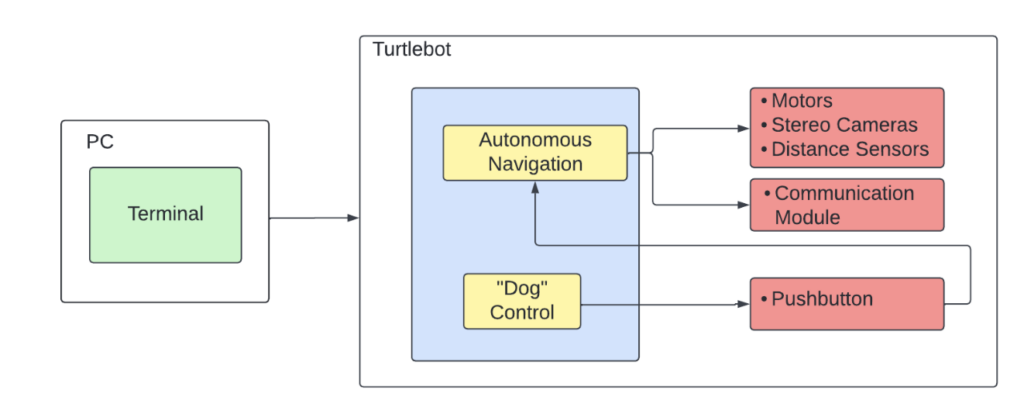
The autonomous navigation robot guide dog project consists of two main modules of computer vision and autonomous navigation. It can be seen that both of these modules are necessary for the purposes of this project. Through the creation of various Python scripts and computer vision techniques, the goal of an autonomous navigation guide dog can be achieved. The overall system architecture block diagram, Figure 1, of the design, can be found below.
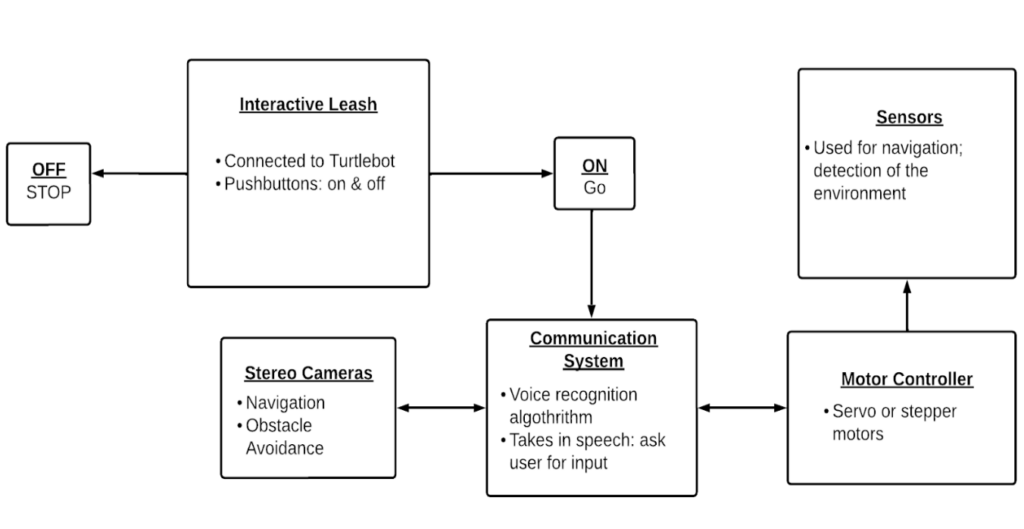
In Figure 1, the high-level visualization of the entire system is presented, with the two main connections being between the PC and the Turtlebot3 Waffle Pi. Within the terminal, the user is able to communicate with the Turtlebot3 Waffle Pi to conduct the navigation of the robotic device to the desired location. From here the user will have the option to control the “dog” with a push button that enables the starting and stopping of the guide dog. This aspect of the project will be implemented in the latter two semesters. Figure 2 is the high-level view of the system block diagram of the entire navigation processes of the project. Based on the user input, with the use of motors, stereo cameras, distance sensors, and communication modules the robot will avoid obstacles presented in the said path and safely navigate the user to the end location.