
AprilTags are a visual fiducial system used in robotics and for camera calibrations. This system is based on a near-optimal robust lexicographic coding system. Provided this, the changes in lighting conditions and modes of viewpoint have little to no effect on the design and coding system. Conceptually speaking, AprilTags can be compared to QR codes as once they are scanned, hidden data is revealed. These tags are a type of two-dimensional bar code, but what results in the large separation between this system and other visual fiducial systems is the design. AprilTags have been created for the encoding of smaller data payloads that range between four and twelve bits of data. The main purpose of this is to allow for longer ranges to be detected and for the increase of robustness. Higher localization accuracy is also seen through the computation of the exact 3D position of each AprilTag with respect to the camera.
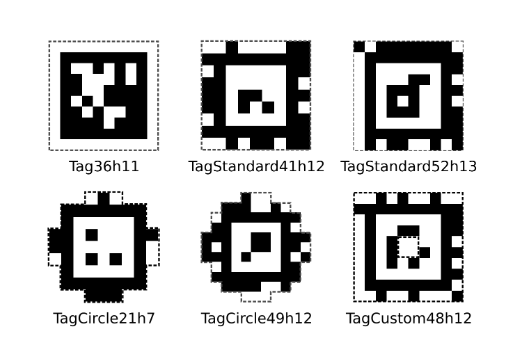
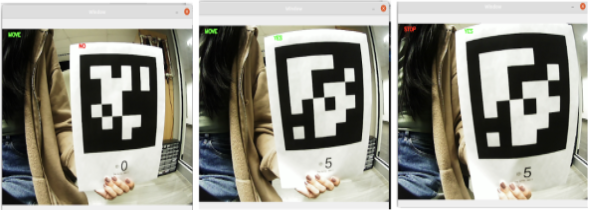
Figure 4 represents the live feed of the StereoCamera identifying an AprilTag. As the desired destination is identified as ARM 102, the top left corner will state “MOVE” until the correct AprilTag is detected. In this case, “correct” means the user’s input room number matches the AprilTag seen within the camera’s frame. The .csv file provided allows for the comparison between the user’s input and the respective tag being seen.
