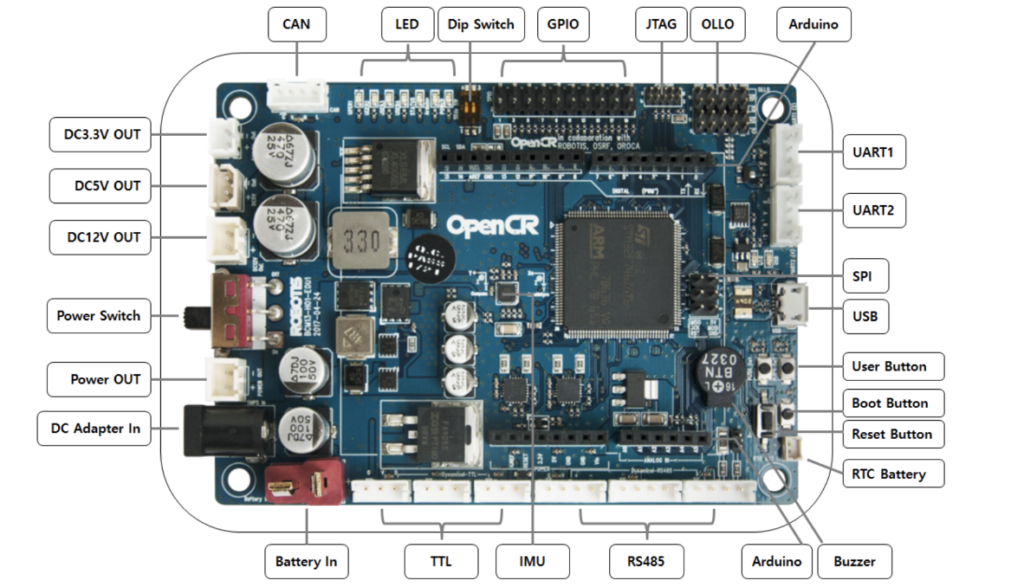
The TurtleBot3 Waffle Pi is the platform being used for the said application. Based on the project budget, the Turtlebot was chosen because it was previously purchased and is relatively up-to-date in terms of the model. The amount of documentation provided also allows for increased support. Compared to the Leo Rover and MonsterBorg, the TurtleBot3 operates using the 32-bit ARM Cortex-M7 board. The OpenCR 1.0 board was developed for the ROS embedded systems in an effort to provide both open-source hardware and software. The STM32F7 series chip within this board is based on the ARM Cortex-M7 with a floating point unit. The development environment of this board is based on the Arduino integrated development environment, IDE.
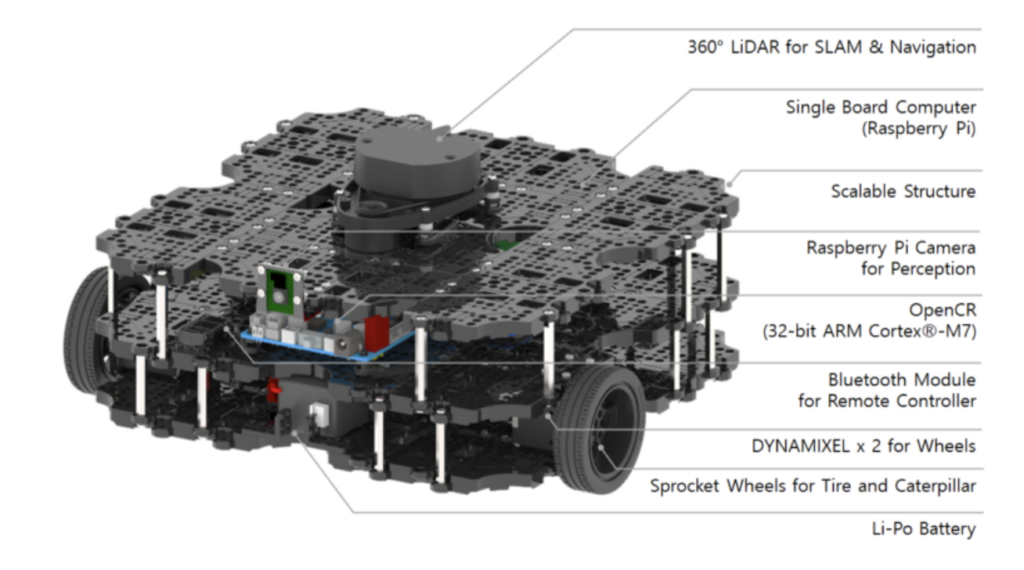
Originally the Single Board Computer, SBC, used for the TurtleBot3 Waffle Pi was a Raspberry Pi 3 microprocessor. Based on the small memory size of the Raspberry Pi 3, the 8 GB Raspberry Pi 4 was tested as it allowed for improved CPU and RAM performance based on the application. After testing, it was found that there were many dependency and compatibility issues that came with the Raspberry Pi 4. These issues dealt mostly with the installation of the robot operating system, ROS, and Ubuntu. This alongside the inability to utilize the desired stereo camera in parallel with this microprocessor resulted in the switch to the Nvidia Jetson Nano. This microprocessor compared to the supplied microprocessor, although more pricey, has increased RAM and CPU. Stereo camera capabilities after testing were proven to work.

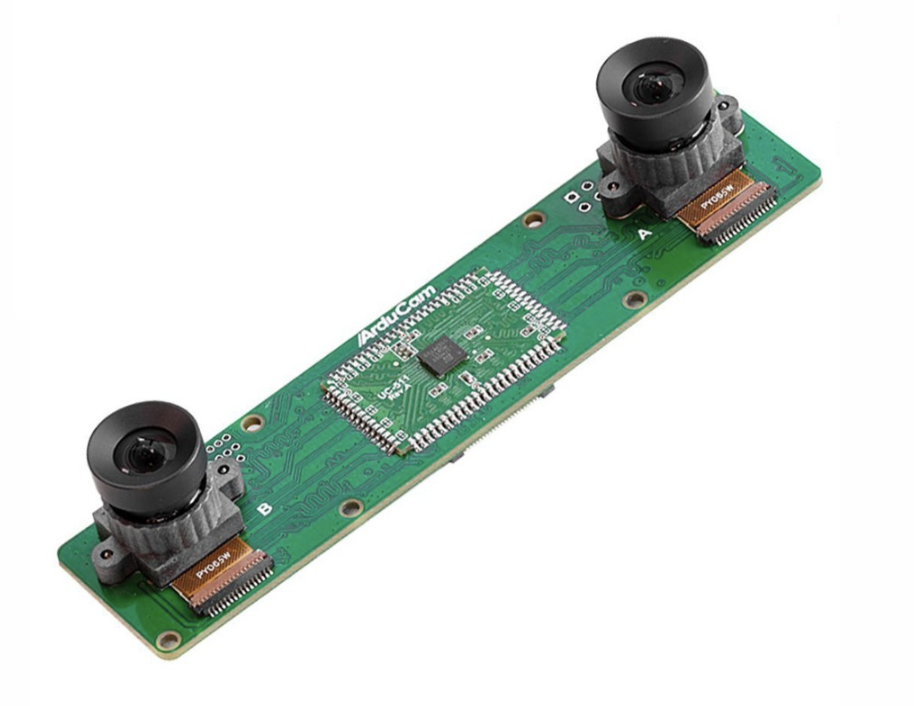
The Arducam 2MP*2 Stereo Camera, shown in Figure 4, was selected as the support platform encompassing a variety of microprocessors, and the resolution enabled the use of the application in the Senior design. A basic visual of the stereo camera is when the Arducam is broken up into two representing the left camera view and the right camera view. This camera MIPI module has two synchronized monochrome global shutter image sensors and allows for a high level of detail and sensitivity, thus enabling higher accuracy and frame rates within depth extraction.