
Madison Bland
Madison is studying electrical engineering at The College of New Jersey. She is responsible for the mechanical arm design allowing the robot to retrieve objects, as well as the implementation of a machine learning module to identify and retrieve a user desired object. Madison enjoys spending time outside and relaxing with family and friends. After graduation she plans to attend graduate school to earn her Ph.D. in Electrical Engineering. She hopes to continue her career in academia by becoming a professor and participating in research.

Shane Chiovarou
Shane is a senior computer engineering major, who is also pursuing a minor in mathematics, at The College of New Jersey. His primary responsibilities in the project include the Navigation and Mapping module as well as the code development for the stepper motors and ultrasonic sensor. Shane enjoys running, gaming, and spending time with family and friends. After graduation, he plans to join the workforce as a hardware-oriented software engineer.
To complete this project successfully, which entailed meeting all required project goals and deliverables for the first semester of development, a team of one electrical and one computer engineer was assembled. Their skills and knowledge of electronics, embedded systems, and software development ensured that the team was qualified for this project. The senior electrical and computer engineers are Madison Bland and Shane Chiovarou respectively. In order to ensure progress was being made at a reasonable pace, the team met with the project advisor, Dr. Seung-yun Kim, on a weekly basis to discuss accomplishments, challenges, and future plans. The team worked collaboratively and independently outside of the weekly meetings in order to research, design, develop, and implement a system on the TurtleBot for mapping, navigating, identifying, and retrieving a goal object. At the inception of the project, each team member was assigned as the lead for different aspects of the project, which allows for parallel work to be done and the project to be completed more quickly. Each member’s responsibilities are described below:
Madison Bland
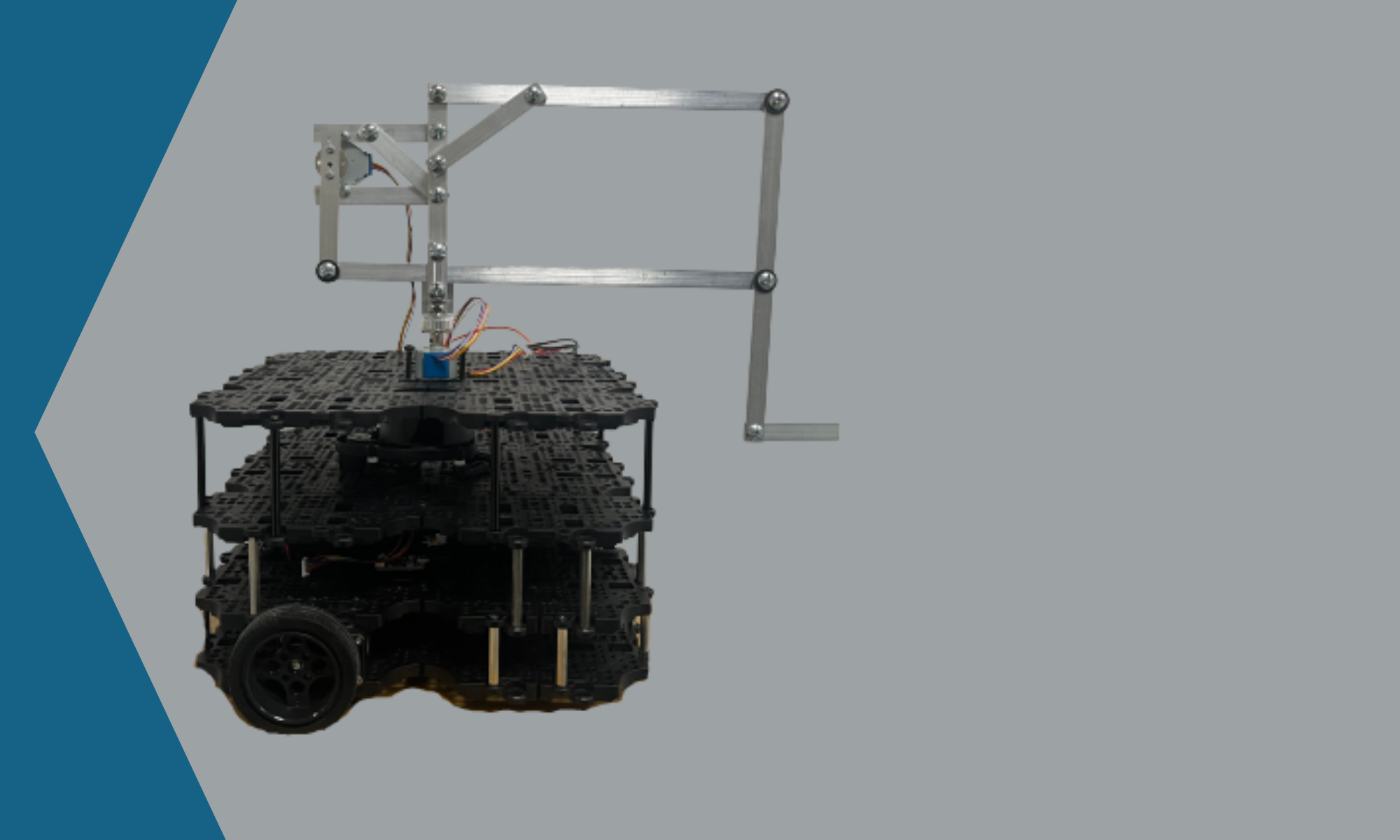
Madison is responsible for the design of the mechanical arm and the implementation of a machine learning module. The mechanical arm design will be drafted in AutoDesk’s AutoCAD. The mechanical arm will be used for the retrieval of a desired object. The design of the mechanical arm consists of two motors which will be used together to allow the arm to make a push and pull motion as well as the ability to rotate along the horizontal plane. Additionally, Madison will implement the machine learning module in order to identify an object to be retrieved. Specifically, object identification will be accomplished using the machine learning capabilities of TensorFlow, an open source platform for machine learning. The user will be able to select a desired object and the TurtleBot will use machine learning to identify the correct object. It will then utilize the mechanical arm to retrieve the object and return it to the user.
Shane Chiovarou
Shane is responsible for the mapping and navigation of the TurtleBot. When launched, the mapping module will be able to explore an unknown space and create a map of the area. Once satisfied with the result, the user can save the map and launch the navigation module, which will allow the TurtleBot to reach a go to a desired location on the map with a desired orientation. All of this will be coordinated from the station pc as the TurtleBot is free to roam the space. Shane is also responsible for the circuitry and Python code that will control the stepper motors and ultrasonic sensors. The stepper motors need to be able to turn desired amounts for proper control of the arm in order to retrieve the goal object, and the ultrasonic sensor will supplement the mapping and navigation modules by acting as an additional collision check as well as supplementing the object retrieval by providing the object’s distance from the robot.