Robots are commonly utilized in hazardous situations that may put humans in danger, including tasks such as hazardous materials handling and navigating dangerous environments. These robots are commonly designed specifically for the location they are deployed or they must be manually controlled by a human to handle different environments. Each of these solutions has the drawbacks of lacking versatility in different locations or is prone to human error. This project is a proof of concept which aims to create a system that will alleviate the issues in current systems. The TurtleBot3 WafflePi will be used to map an unknown area, navigate to a desired location, and identify and retrieve an object. The goal is to develop a system that will augment the TurtleBot with a robot arm and additional circuitry to allow a user to dictate these actions from a station computer a safe distance away. A Light Detection and Ranging (LiDAR) sensor will be used to generate the map and assist in navigation. From there, machine learning will be used to identify the goal object and will call python scripts which will interface with the robotic arm and associated ultrasonic sensor in order to pick up the object and return to a desired location.
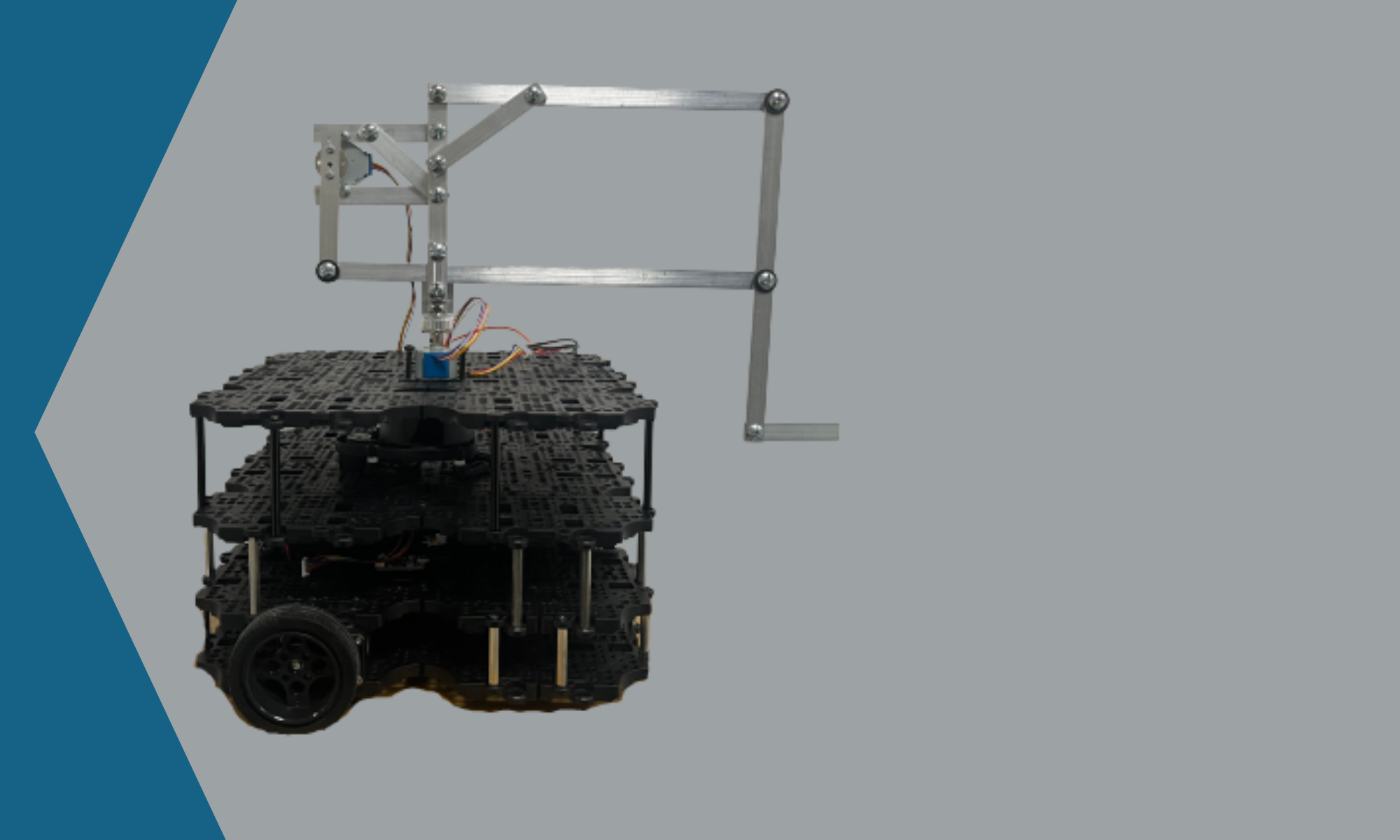
Obstacle Mapping Robotic Navigator and Materials Handler
Madison Bland and Shane Chiovarou Senior Project AY21-22