
The NAO robot is 574 mm tall, 275 mm wide, and 311 mm deep. It wieghs 5.4 kg.
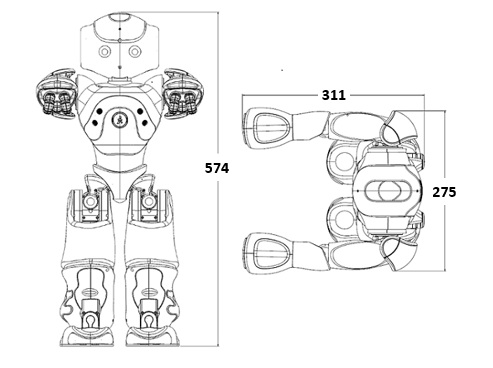
Figure 1. NAO Robot Dimensions
We will be using four, sixty milimeter arcade buttons to control the forward and backward driving as well as left and right steering. We found the sixty milimeter buttons to be the appropiate size for the NAO robot. They are not too small where the NAO misses pressing them and not too large where it is too big for the base plate width. These buttons are micro switches where the NAO has to continously apply pressure for the button to work.

Figure 2. 60mm Arcade buttons for NAO steering
The nao robot will have four pre-defined arm movement motions to press the buttons to drive forward and backward and steer left and right. Once the button panel is built, the spacing of the buttons is worked out, and the panel has a permanent distance from the chair the NAO will sit in, we will created the pre-defined button pressing motion.
