
Welcome to Your SUPER-powered WP Engine Multisite Install. This is your first post. Edit or delete it, then start blogging!
Force Sensing Glove
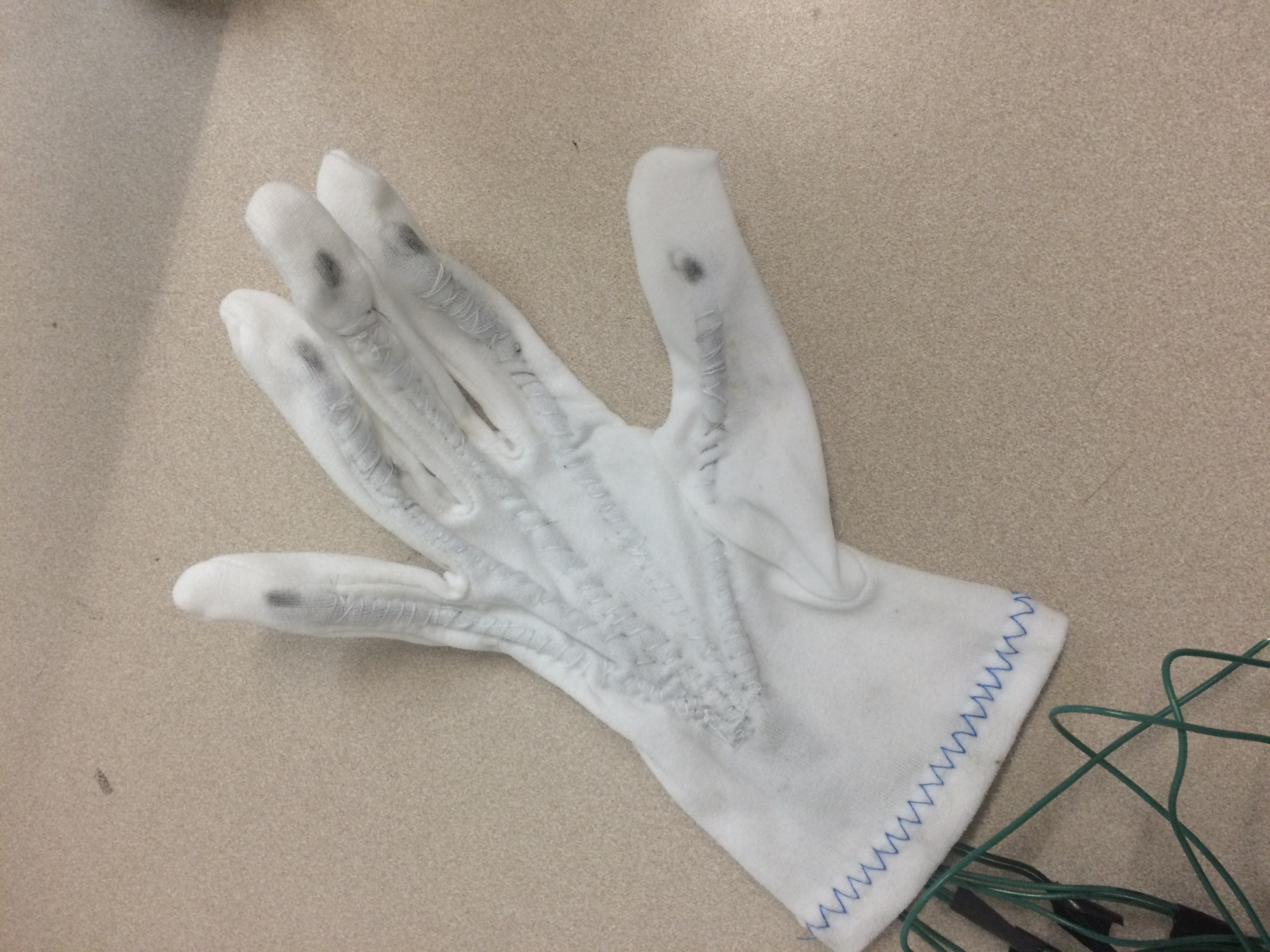
The force sensing glove utilizes force sensitive resistors and an Arduino Uno board. The sensors measure the change in resistance when pressured. The force applied by the user is calculated using a graph of resistance vs. force from the FSR datasheet. The glove is to be used with validation activities.
Updated Hand Design
The final design for the fingers and hand was completed and 3D printed as shown by the pictures below. The new design included new features on the middle and ring fingers allowing the fingers to completely contract. The new thumb design is also shown which allows the user to completely contract their thumb as well. The new compartment which houses the electronics was made slightly thicker to ensure it wouldn’t break.


Northeast Bioengineering Conference (NEBEC) 2017
We had our abstract accepted to the Northeast Bioengineering Conference which was located at New Jersey Institue of Technology. We created a PowerPoint presentation to explain the purpose of the device and how we would plan to market and advertise for the device. This was a competition in which we presented to a group of three judges.

Specifications
- The device must be able to reduce grip muscle effort by 25%
- Hold an item with a diameter between 1 cm and 7.5 cm
- The weight of the entire device must be less than or equal to 20 lbs
- The device must be able to be donned and doffed within 1 minute without assistance
- Replaceable parts of the device must be exchanged within 5 minutes
- One finger movement must not influence the movement of another and the device must give access to a wider range of hand functions
- The force measured by the glove must be within 10% of what is read during the same activity by the force dynamometer
- The device must be able to output the force data into a .CSV file, capable of being stored in MATLAB
- Device must not cause damage to the user
Requirements
- The device must be able to augment user’s grip strength
- The device must be able to assist the user in holding items of different sizes
- The device must be portable and easily carried
- The device must be easily donned and doffed
- Replaceable components are easily exchanged by the user
- Fingers must operate independently of each other
- The device must be able to accurately measure the force produced by the hand during the validation of augmenting the user’s grip strength
- The glove must be able to store the measured forces
- Must be safe for the user
First update!
Throughout the first couple weeks of the semester, we have begun to define our problem statement by working on determining our preliminary requirements, specifications, and justifications. Realistic constraints are also currently being developed with justifications as well. The preliminary requirements encompass a range of dimensions for the hand along with a proposed weight of the device. Further requirements are stated to fulfill the goal of using this device for assistance in daily activities.