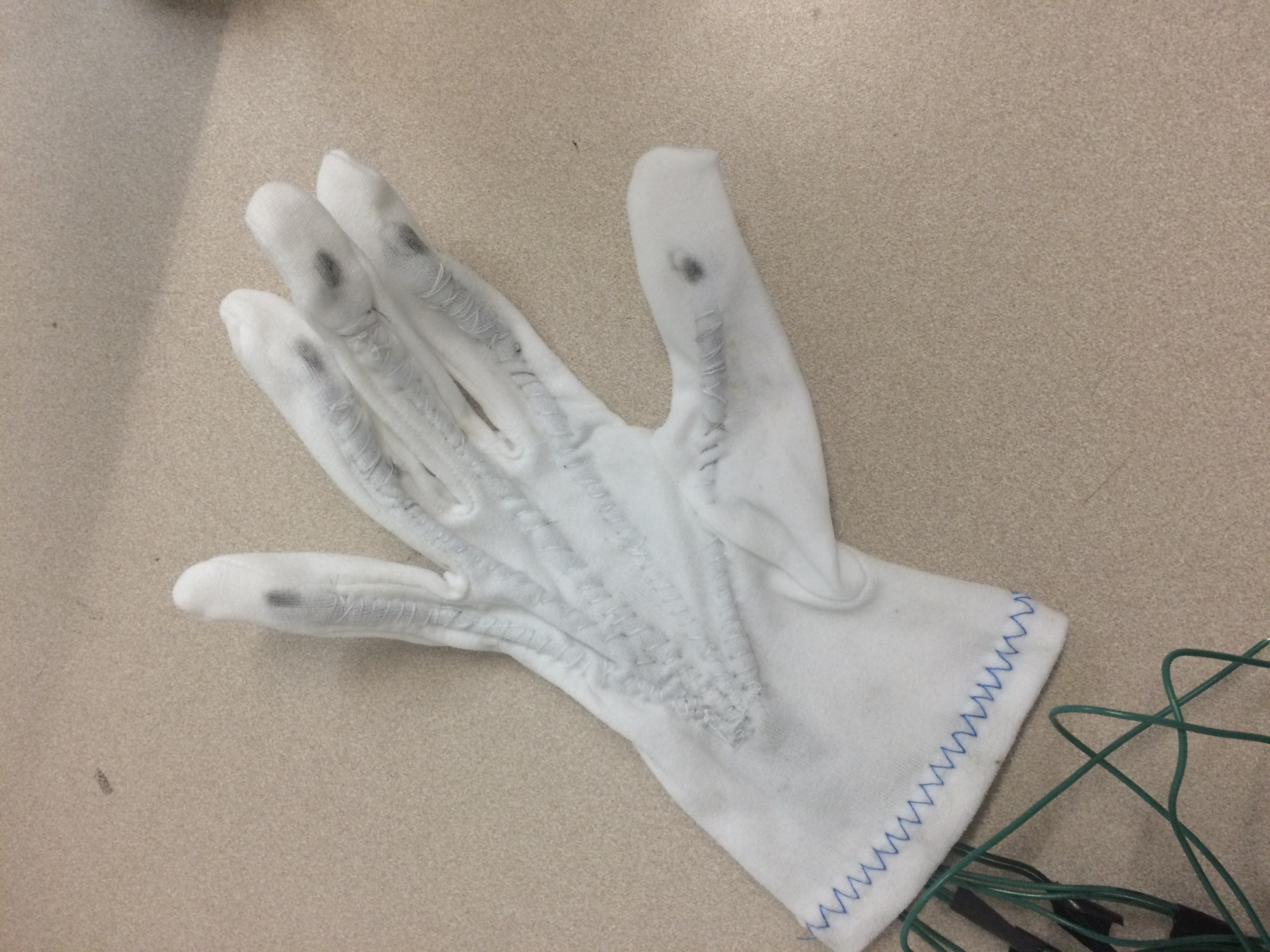
The force sensing glove utilizes force sensitive resistors and an Arduino Uno board. The sensors measure the change in resistance when pressured. The force applied by the user is calculated using a graph of resistance vs. force from the FSR datasheet. The glove is to be used with validation activities.