
Introduction
The GPS system is vital to the recovery of the payload. The GPS system was designed to collect frequent data points and transmit them to the payload at distances spanning from the payload to the balloon. The data points contain Latitude, Longitude, speed over ground, height, and horizontal degree of precision. The signal will be processed by our microcontroller, and be used to recover the payload upon landing. It is absolutely imperative that the GPS works exactly as intended, otherwise the payload risks being lost, along with the rest of our data.
Components
Base Station Communication Components
There are two system designs in the GPS system which include the payload and base station. The components in our base station include the Yagi antenna, RFD modem 900+, arduino nano, SD shield and micro SD card. The purpose of the arduino nano is to feed the GPS locations to our laptop from our RFD modem. The SD card is used to store data and the SD shield is to store the SD card.

Payload Communication System
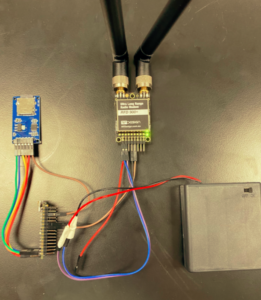
The components in our payload include the RFD modem 900+, GPS receiver, two duck antennas and the battery pack. The purpose of the RFD modem is to communicate with other modems and the way a signal is transmitted is through the antennas. The GPS receiver is used to track the coordinates of our balloon.
Implementation
The communication system’s implementation is dependent on the RFD 900+ radio modems. These devices communicate serially, and this serial communication is used throughout the entire system. The GPS receiver passes serial data to the modems, which then pass the data to the Arduino where it is processed. The data is stored in an SD card for mapping and location purposes.