
Welcome to Your SUPER-powered WP Engine Multisite Install. This is your first post. Edit or delete it, then start blogging!
Controller Rough-Design and Gesture Sensor Progress
Controller development and sensor programming has been underway for a few weeks now. Right now, we have a rough mock-up since we aren’t nearly ready to finalize the design and only one of the sensors is up and working as expected. Nevertheless, we are still able to get a good feel of how we will interact with the controller when using the gesture sensor, which controls the robot’s leg motion.
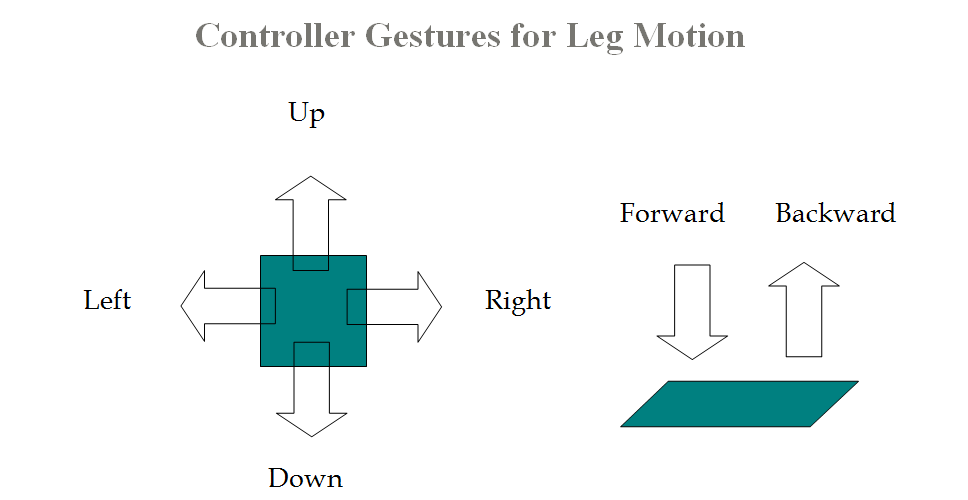
The sensor takes up to 15 gestures, but we are currently implementing 6 to avoid making things unnecessarily complicated. We want the controller actions to be intrinsic, rather than heavily involved and requiring memorization/studying beforehand. After all, things are supposed to be easier with a controller, not harder!
So, without further ado, here is the current controller design with the gesture sensor mounted at the top. The arduino board sits atop an arm brace which has Velcro supports around the forearm and palm. We found this configuration to be more comfortable and less cumbersome than the controller being mounted solely on the forearm.
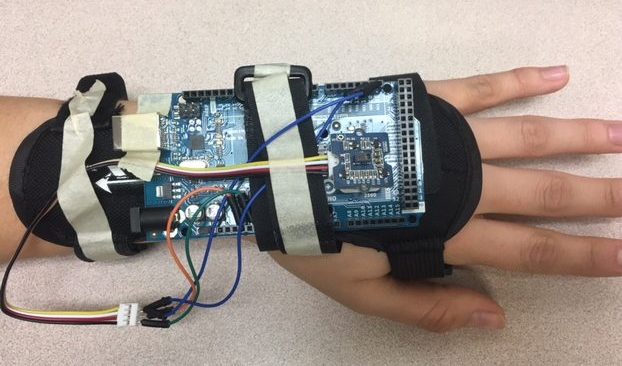 The image above shows the controller’s proper orientation for gesture input. The user will pass their hand over the sensor in any of the 6 directions shown below and that will be sent to the robot for execution.
The image above shows the controller’s proper orientation for gesture input. The user will pass their hand over the sensor in any of the 6 directions shown below and that will be sent to the robot for execution.
Behavior Building

Bluetooth Communication Test
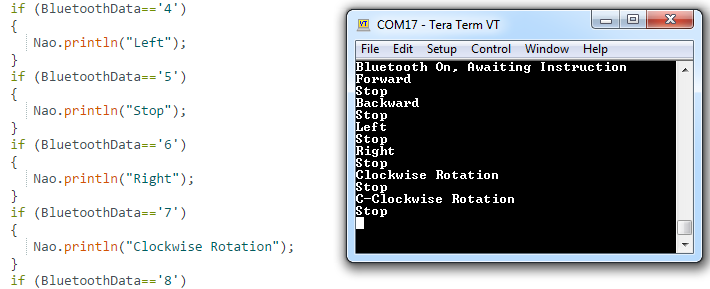
Preliminary tests using the Bluetooth communication module with Arduino are underway. A basic code was set up to determine user input from a keyboard and print a response describing an action. The action itself is yet to be implemented but this test demonstrates a proof of concept. Since we have tentatively established nine actions for the robot to possibly carry out, we used the number pad from 1-9 as inputs for the script. More tests will follow.
Parts Ordered
| Item | Quantity | Cost per Quantity ($) | Total Cost ($) |
|---|---|---|---|
| Arduino Board (Mega 2560) | 1 | 45.00 | 45.00 |
| Gyrometer | 3 | 16.00 | 48.00 |
| Accelerometer | 2 | 19.00 | 38.00 |
| Magnetometer | 2 | 6.00 | 12.00 |
| Gesture Sensor | 1 | 17.00 | 17.00 |
| 9v Batteries (8 pack) | 1 | 13.00 | 13.00 |
| Arm Strap (12 pack) | 1 | 5.00 | 5.00 |
| Breadboard + Wires | 1 | 7.00 | 7.00 |
| Team Size | 2 |
| Budget per Person | 100.00 |
| Total Budget | 200.00 |
| Total Expenditure | 185.00 |
| Remaining Funds | 15.00 |