Week of 3/10/19

The team had their first successful flight. Drone is able to stabilize altitude. The team is shifting their focus on a dropping mechanism and landing gear.
Week of 3/4/19

The picture above shows the flight controller stacked on top of the ESC and power distribution board. In order to arm the drone for liftoff, the flight controller must be level. 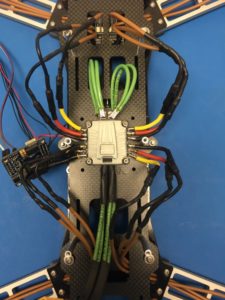
Receiver and ESCs installed. Wireless communication between the transmitter and receiver work with both SBUS and PPM. All four motors spin in correct direction and can be controlled by the transmitter. 
The picture above shows one of the four new arms. They are CNC cut out of carbon fiber.
Week of 2/25/19
The last parts (receiver and ESCs) arrived. The team is currently working on installing these new parts on the drone. If all goes well, the drone should be flying soon.
![]()
The picture above shows the T8FB Transmitter and Receiver. The receiver uses both SBUS and PPM protocols. PPM stands for Pulse Position Modulation. It is an analog signal that changes the position of a pulse over time. SBUS stands for Serial BUS. It is a digital signal that supports up to 18 channels using one cable. The drone will be communicating using SBUS.

The picture above shows the new Electronic Speed Controller (ESC). It controls and regulates the speed of the four electric motors of the quadcopter. Previously, there were 4 separate ESCs, one for each motor. Now all four are on a single chip.
Week of 1/28/19