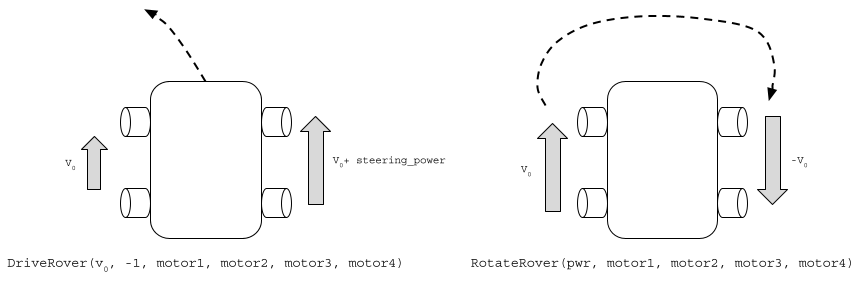
The group created functions called DriveRover and RotateRover that could handle all of the processes and math that go into steering and rotating the rover. Essentially, they are functions used for multi-motor control. These functions accept four MotorNoEncoder objects to be passed in, one for each motor, and will generate the proper control and PWM signals for all four motors depending on the user input.
The diagram below shows the physical manifestations of the DriveRover function. Besides the motor objects that were instantiated from our MotorNoEncoder class, it also accepts a power and direction (dir) input to dictate both dictate the direction in which the motor will drive.
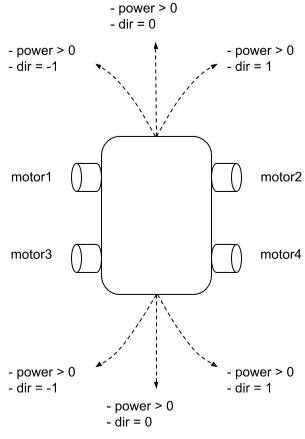
Below shows the basic functionality of both the DriveRover and RotateRover function.