We developed a GUI for the tele-operated rover functions using the Tkinter library in Python. This layout allows for more intuitive control of the motor for the basic steering capabilities, as well as with integrated camera access with a snapshot feature.
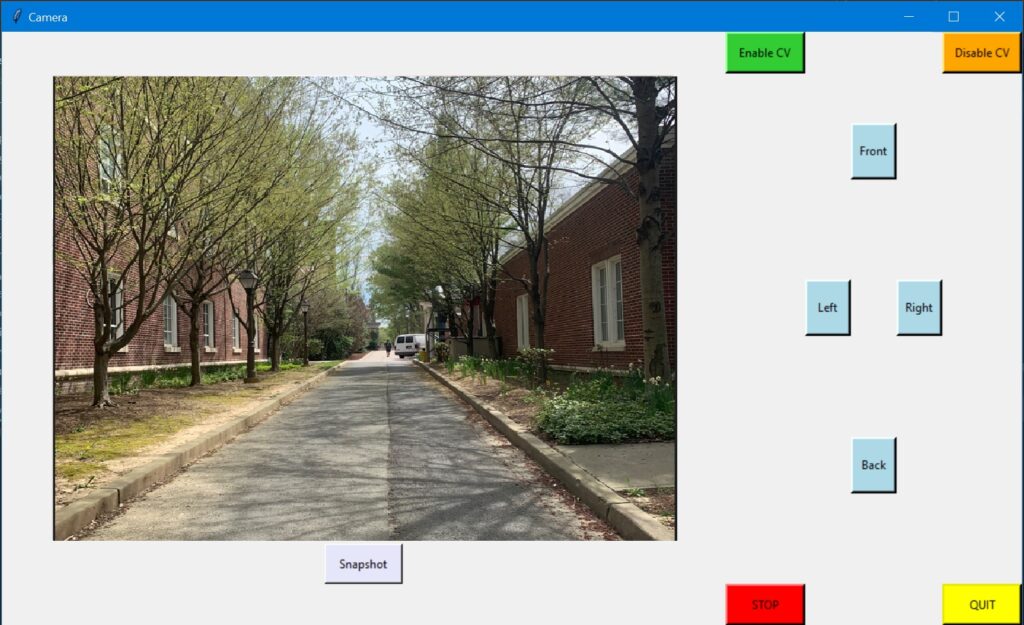
The “Snapshot” button allows for the user to capture an image of the current video feed and save it to the Desktop file path with the timestamp automatically saved in the filename.
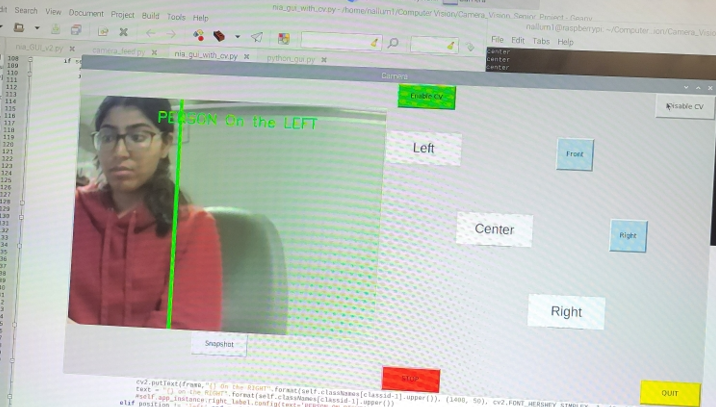
We have intergated computer vision system with the GUI interface above, but limited to only detect humans for the sake of testing. However from eariler iteration it is able to identify many different indoor and outdoor objects. The image belows shows how the computer vision is able to tell you were the object is on the screen and draws a green line on the side the object is.