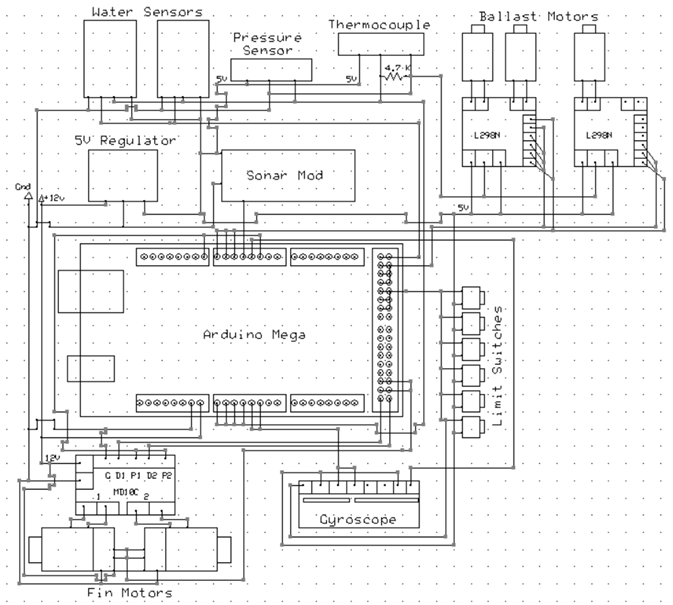
The electrical system of the submarine will contain all of the following components:
- Arduino Mega
- Sonar Communicator
- Motor Controllers
- Motor Encoders
- 3 Axis Gyroscope
- Water Sensors
- Pressure Sensor
- Thermocouple
- Limit Switches
- 12V NimH Battery
The electrical system of the submarine will contain all of the following components:
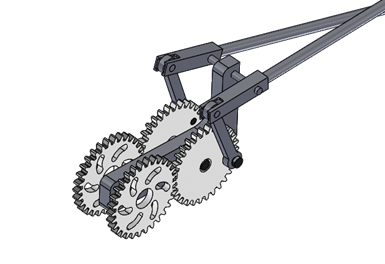
In order to produce the correct undulation motion through mechanical components, a series of linkage systems were considered for the Silent Submarine.
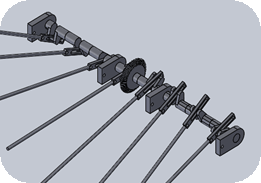
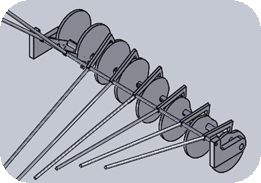

Version 6 of the linkage system was chosen for the design of the submarine. This system utilizes a crankshaft, four-bar linkage mechanism, and gears to produce the selected waveform parameters.
The hull was designed to house all mechanical and electrical components. The hull is broken into a flooded and dry section – where all electronics are going to be placed in the dry box, while other components, such as the linkage system, will be in the flooded section. This bisection of the hull will limit the number of concerned water penetrations and simplify the overall waterproofing of the submarine.
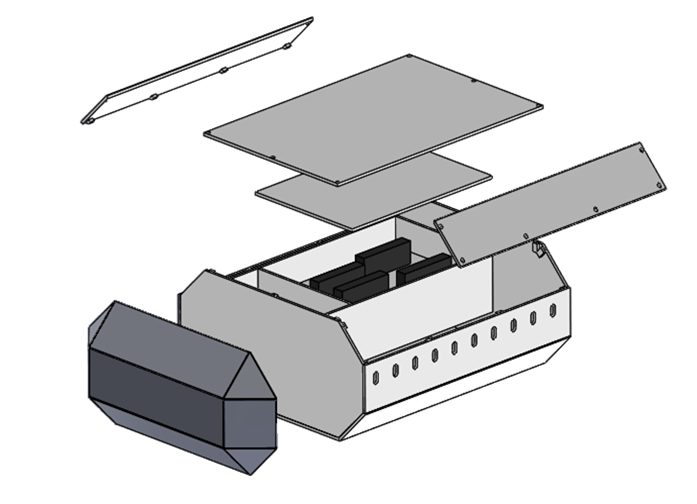
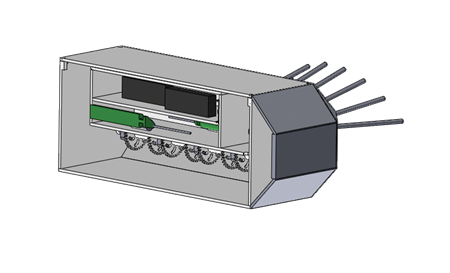
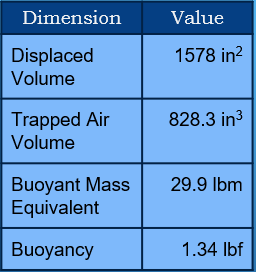
The dry box also provides a buoyant force for the submarine. This buoyant force will be manipulated and ultimately be neutralized in our design.
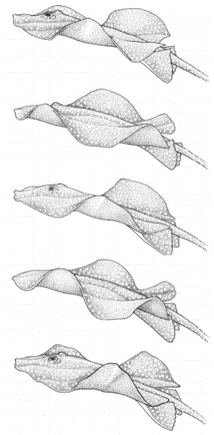
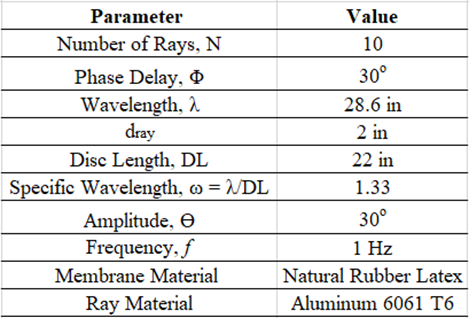
The undulation motion is entirely dependent on the materials, waveform parameters, and morphology of the fins. Therefore, each parameter was thoroughly analyzed and selected based on efficiency, optimal thrust, dimensional analysis, and success of previous researchers. Our initial calculations and findings have led to the following parameters:

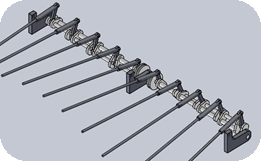
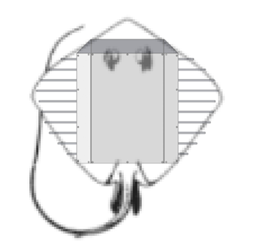
As for the morphology of the fins, the shape will be based on the Dasyatis Americana (a.k.a the Southern Stingray). This species of stingray shares similar parameter values and overall size to those chosen for the Silent Submarine – and therefore, it was chosen as the model species stingray for this project.

To clarify, a rubber latex sleeve will be fitted onto the fin rays. Rubber latex is a smooth, flexible material that will enable the proper undulating motion of the submarine.
Code name M-SUB has begun. The team members have begun designing the subsystems and developing a budget.
What is the Silent Submarine?
The Silent Submarine is not your typical type of submarine. Typical submarines maneuver through the use of propellers; however, propellers cause a high amount of noise and disturbances to the aquatic life around them. Additionally, cavitation can occur and cause shorter part life. To minimize or eliminate these concerns, the Silent Submarine will be bio-mimicking the undulating fins of a stingray.