As the APD group work towards debugging and implementing a new control system in the Navio2 and Raspberry Pi 4, students began constructing and simulating the control system of the drone via MATLAB Simulink. The objective was to model the behavior of the drone in various scenarios. By doing, it will help students understand what specific values the PIDs within the drone are required in order for it to fly manually, and then autonomously.
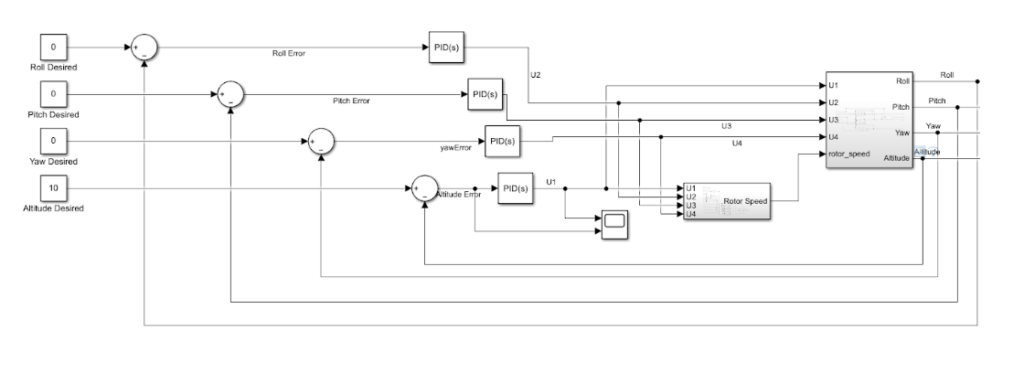
Here, we have a snapshot of the overall control system of the drone. It includes default values for the roll, pitch, yaw and altitude values. All values are then fed into the summing junction, where the system will begin to calculate the error between what is desired versus what was calculated.
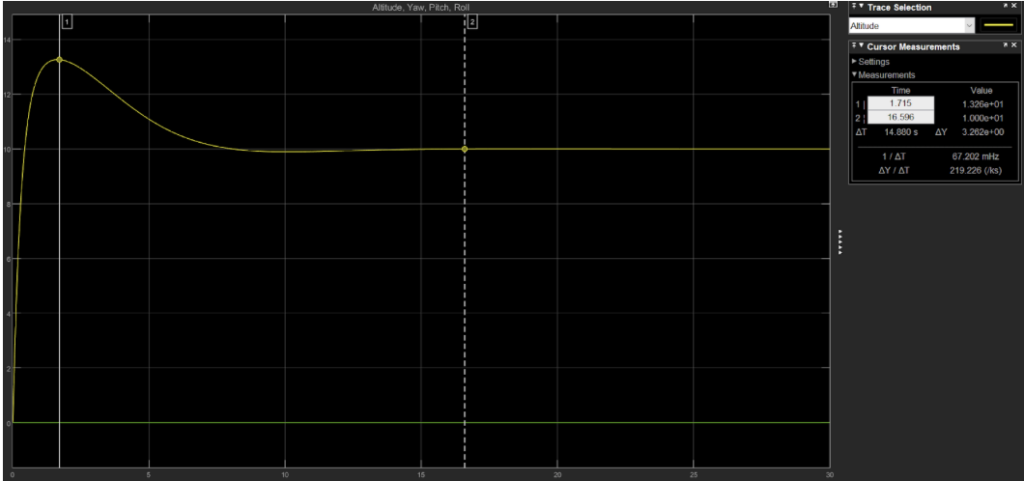
Here, we have a snapshot of the altitude control of the APD successfully implemented via MATLAB Simulink. The values derived from this model will eventually be utilized in the actual coding of the drone when operating manually and autonomously.