
Welcome to Your SUPER-powered WP Engine Multisite Install. This is your first post. Edit or delete it, then start blogging!
WEEK OF APRIL 23RD
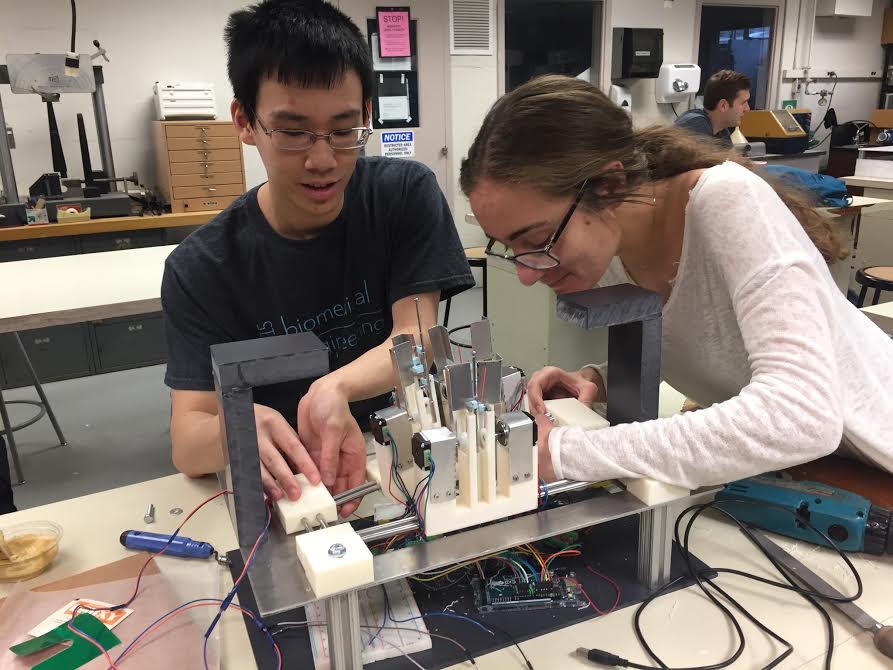
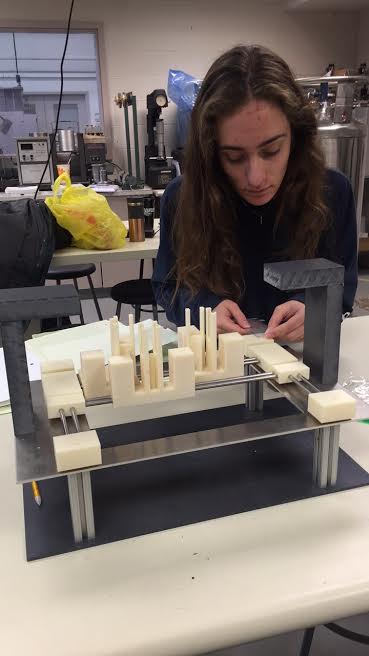
We have solved the problem that we were having where the monofilaments were falling and getting stuck on each other after hitting the foot. To solve this problem, metal pieces that are used to hold the motors in place were made with an extra piece that acts as a divider between each of the monofilaments and keeps the monofilaments in place.
This week we will be testing the device. We will be testing to see if the monofilaments can hit the foot, if they are hitting the specific sites, if the correct output score is shown, and if the test is perceived as random. We will be performing statistical analyses on these results and will have our final presentation next Wednesday.
Up-close video of a single motor
Up-close video of a motor moving the racks along the gear.
Motor randomization
Video showing the randomization of force application.
Adjustability
Video of the adjustability of the device.
WEEK OF APRIL 2ND
The device has been built and we presented our design at the 2017 NEBEC last Friday. We were happy to receive positive feedback at the conference.
This week we will be working on fixing some issues found when running the motors on the frame of the device. Currently, when the motors move the racks along the gears, the racks start to fall out of the 3d printed pieces. We will be solving this problem this week. Additionally, we will be connecting a new pushbutton and an on/off switch to the Arduino. At the end of this week we hope to have the electrical wires organized and the device close to completion.
WEEK OF MARCH 19TH
We have been accepted to present our project at the 2017 Northeast Bioengineering Conference next Friday, March 31st!
The rail system has been adjusted to fit onto the frame. This week we will be using the Arduino code to run the stepper motors. Additionally, the code for the output score algorithm will be finalized and will be tested using a pushbutton connected to the Arduino.
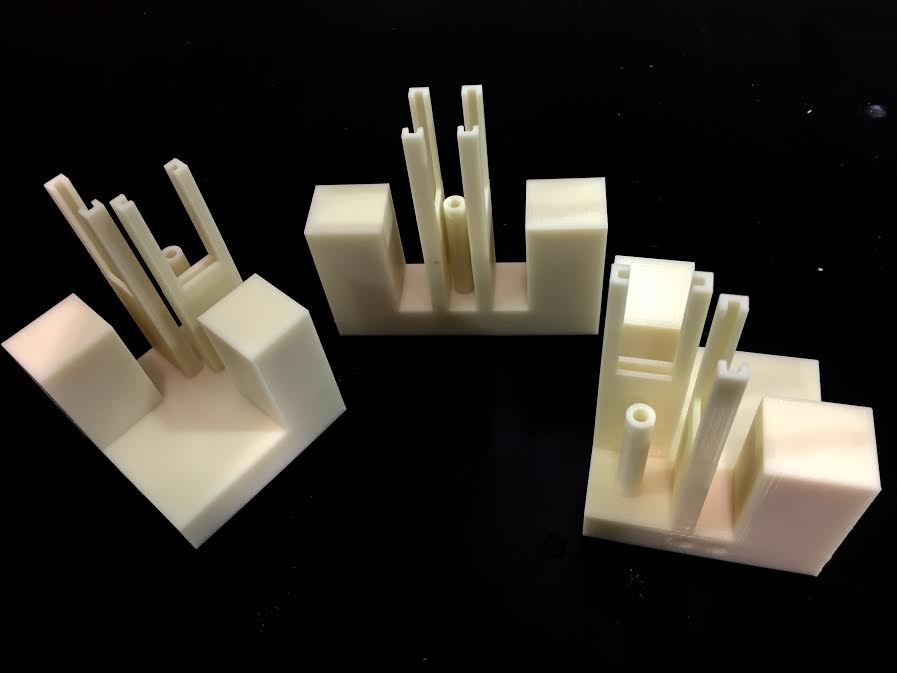
3D PRINTED PIECES FOR ADJUSTABILITY
WEEK OF FEBRUARY 26TH
The rest of the adjustability pieces have been 3D printed. This week the heel cup shelf will be finalized and the 3D pieces as well as the antennas will be adjusted. Additionally, the verification processes for the randomized locations and force levels will be finalized. The randomization code has been altered in order to control the motor drivers. This will soon be tested on the hardware.
3D Printing
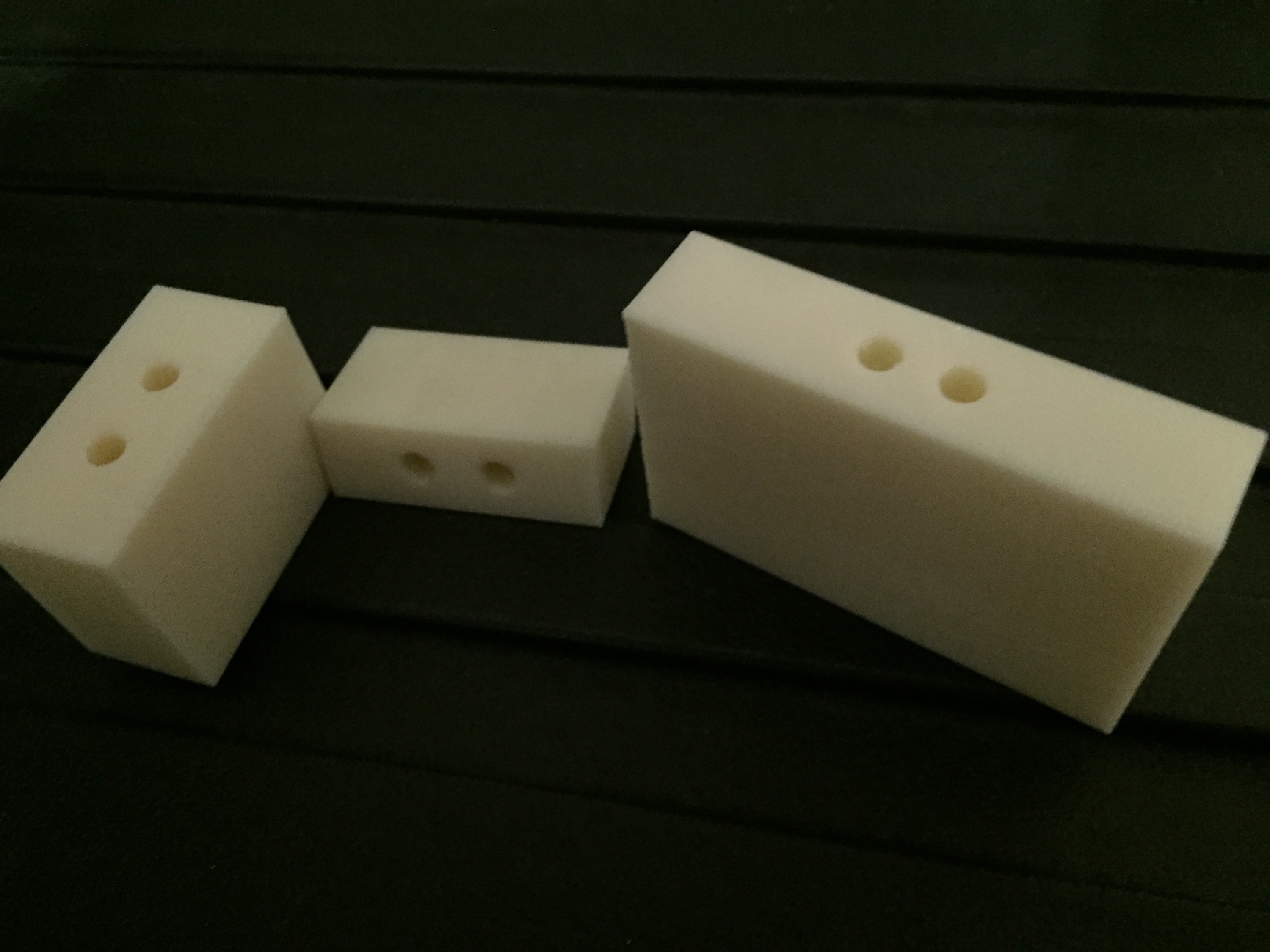
3 of the blocks that will be used to adjust the location of the force applicators have been 3D printed.