
The hardware for this project consists of the following:
- NAO Robot
- Microcontroller
- Motors
- Fabricated Headset
- Fabricated Backpack
- Fabricated Facial Features
NAO Robot
For this project, the TCNJ Electrical and Computer Engineering department has been kind enough to lend us a NAO robot for design and testing of our project. A schematic of this NAO robot which details its features can be seen below.

Microcontroller
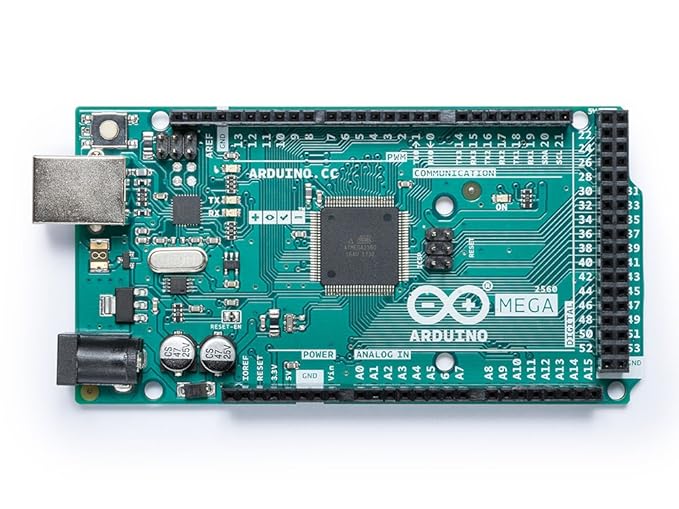
The microcontroller for chosen for this project is the Arduino Mega Rev 3 (pictured below). Additional boards researched for this project include the Arduino Uno and the Arduino Nano; however, the Arduino Mega was chosen due to its ample number of PWM pins, which will enable us to connect more motors to the board if needed. Research was focused on Arduino-based boards, because these boards are reputed to have better compatibility with NAO robots.
Motors
As per our project specifications, the motors for this project needed to be small and light-weight. For that reason, we have chosen to use Tower Pro SG51R Sub-Micro Digital Servo motors. These motors are 25mm * 12mm * 22mm and weigh only 5g, while still generating enough torque to effectively rotate our fabricated facial features, making them ideal for our project. Servo motors were chosen rather than stepper motors due to servos being available in smaller sizes, and requiring less driving current.

Headset Design
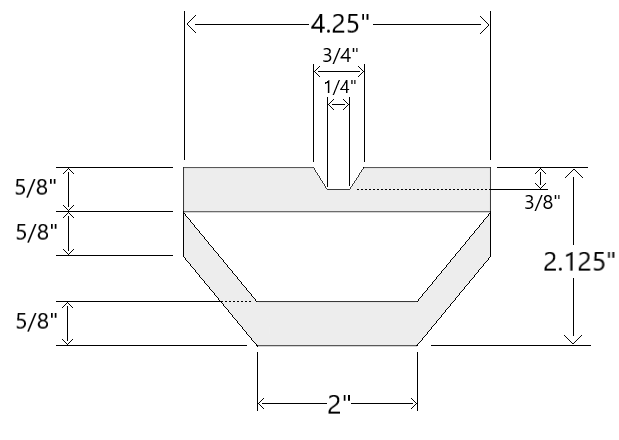
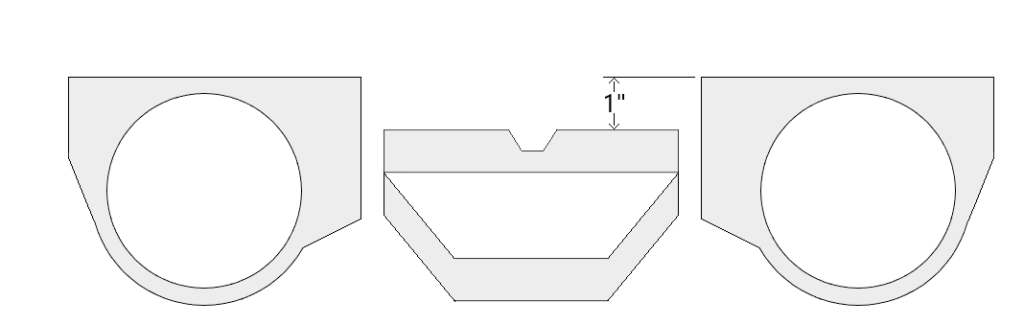
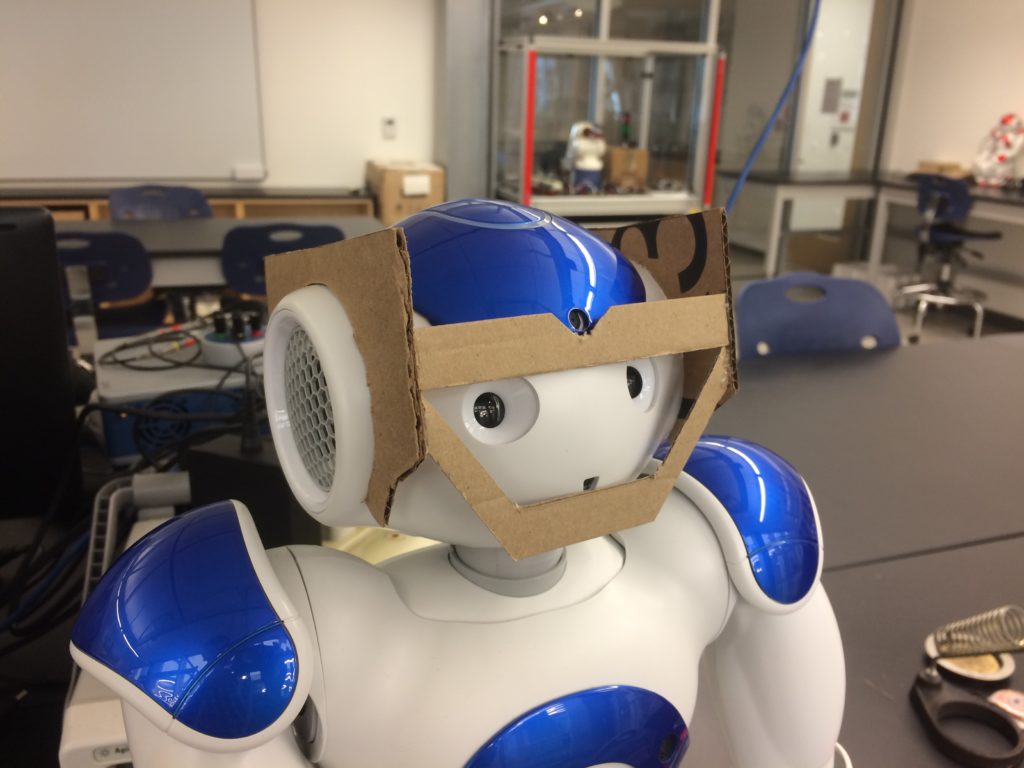
A headset is being designed for NAO as a means for securing the facial features we are developing. The headset design looks similar to a helmet, with two rungs: one that goes over NAO’s eyes, and one that runs near NAO’s mouth. Two rotating eyebrows will be attached to the upper rung, while an adjustable pair of lips will be attached to the bottom rung. Large holes are cut from the sides of the headset, allowing it to slip over the circular sides of NAO’s head. Front-view design schematics for the headset can be seen below, as well as a fabricated prototype made from cardboard.

Backpack
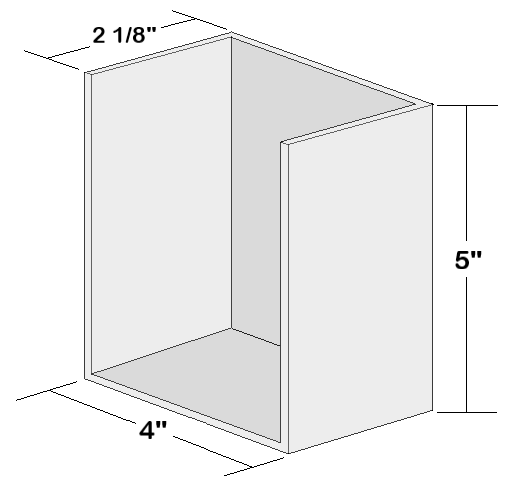
A backpack is being designed to sit on the back of our NAO robot. This backpack will hold our Arduino microcontroller and servo motors, as well as any loose wiring. It will attached to NAO’s back using Velcro. An orthographic sketch of the backpack design, along with a picture of the fabricated version, can be seen below.

Facial Features
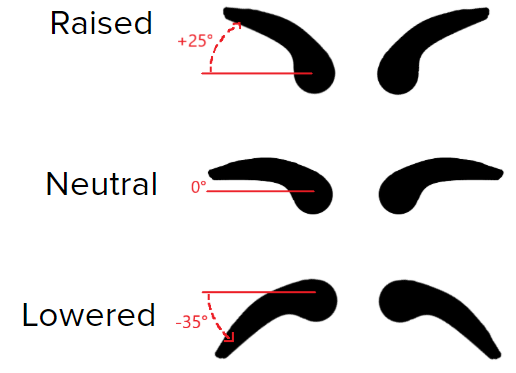
Developing physical, mechanical facial features for NAO is an integral aspect of this project. These facial features will consist of eyebrows and a pair of lips. The eyebrows will have three configurations: raised, neutral, and lowered. In the raised configuration, the eyebrows will be rotated approximately +25 degrees upward from their neutral position, causing them to be angled downwards. In the lowered configuration, the eyebrows will be rotated -35 degrees downward from their neutral position, causing them to be angled upwards.
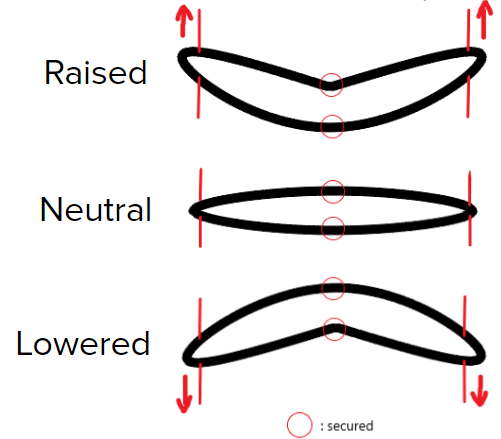
The fabricated lips will also have a raised, neutral, and lowered configuration. These configurations will enable to the lips to form a smile, a neutral expression, or a frown.
When combined, the three eyebrow configurations and three lip configurations will allow for the three target emotions — happy, sad, and angry — to be expressed by the NAO. The exact configurations of the eyebrows and lips for each emotion can be seen in the table below.
| Emotion | Eyebrow Configuration | Lip Configuration |
| Happy | Lowered | Raised |
| Sad | Lowered | Lowered |
| Angry | Raised | Lowered |
Currently, construction of the facial features is underway.