System Architecture
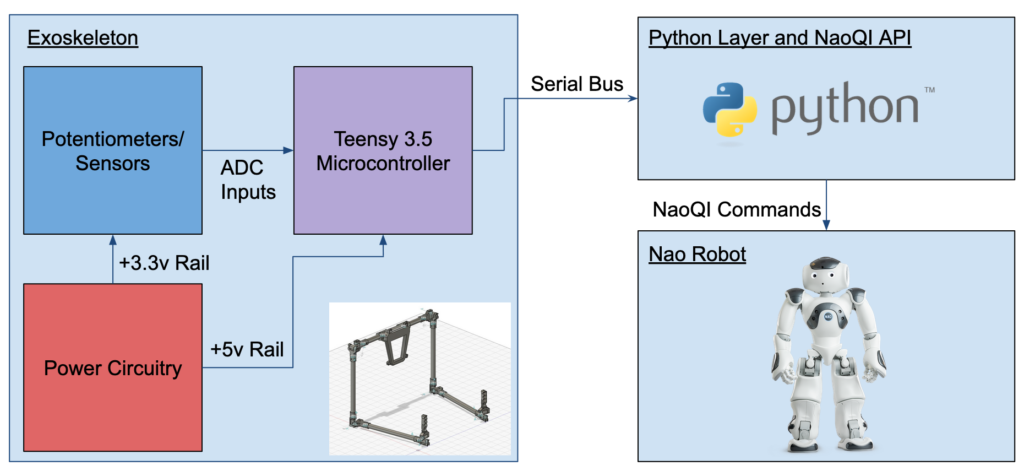
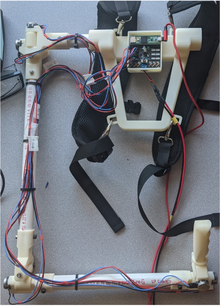
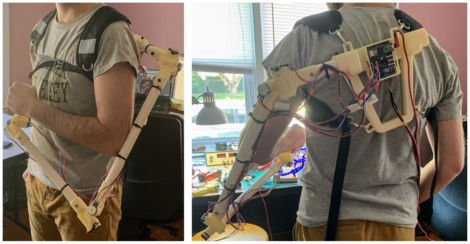
The project utilizes an upper body exoskeleton with potentiometers that directly capture joint angle positions. The potentiometers will provide joint angle data by having their positions read by a microcontroller. The microcontroller will apply mapping, smoothing, and acceleration/deceleration algorithms to the angle data from the potentiometers. This data will be sent via a serial connection to a PC running a Python intermediary layer, which will translate the angle data to robot commands These commands will be passed to a Nao robot, which will copy the user’s movements in near real-time.
Electronics Architecture


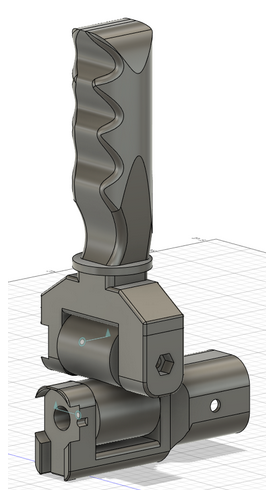
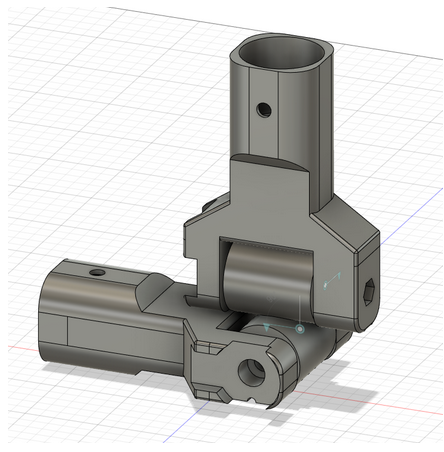
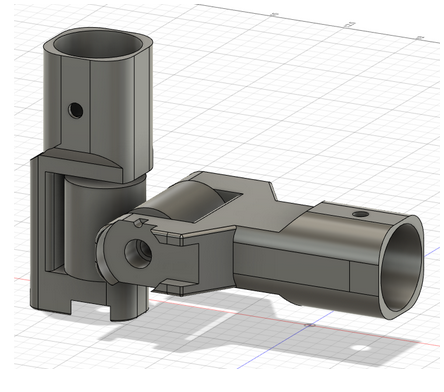
Exoskeleton Design/Implementation