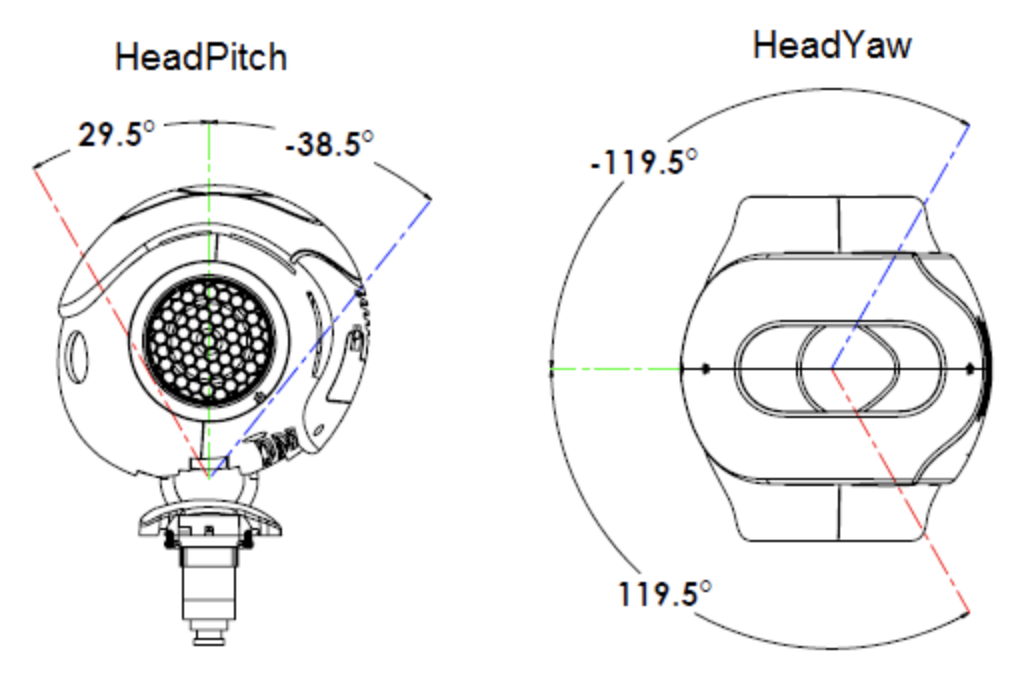
For the head motion of the robot, gyroscope data will be taken from the mobile phone as the user turns their head in order to control the head motion of the robot. The NAO robot has two ranges of motion known as HeadPitch (the y-plane of the phone) and HeadYaw (the z-plane of the phone). The gyroscope values taken from the mobile phone will be scaled for the NAO’s head more limited range, but if the angles specified by the gyroscope data are outside of the specified constraints shown in the figure below, the angles go to the max values allowable.