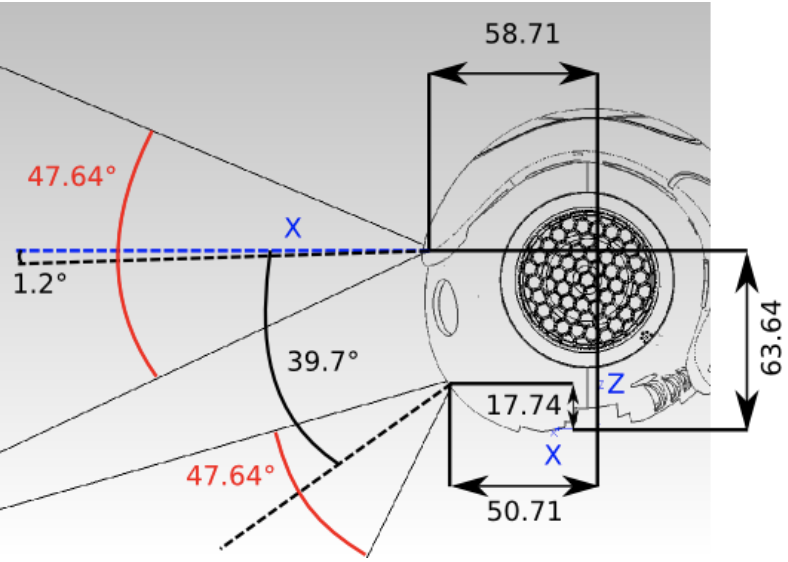
The NAO robots have two cameras located on their head (one on their forehead and one where their mouth would be) capable of providing images of 1280×960 resolution at up to 30 frames per second. The cameras each have a field of view of just under 50°, as can be seen in the figure below.
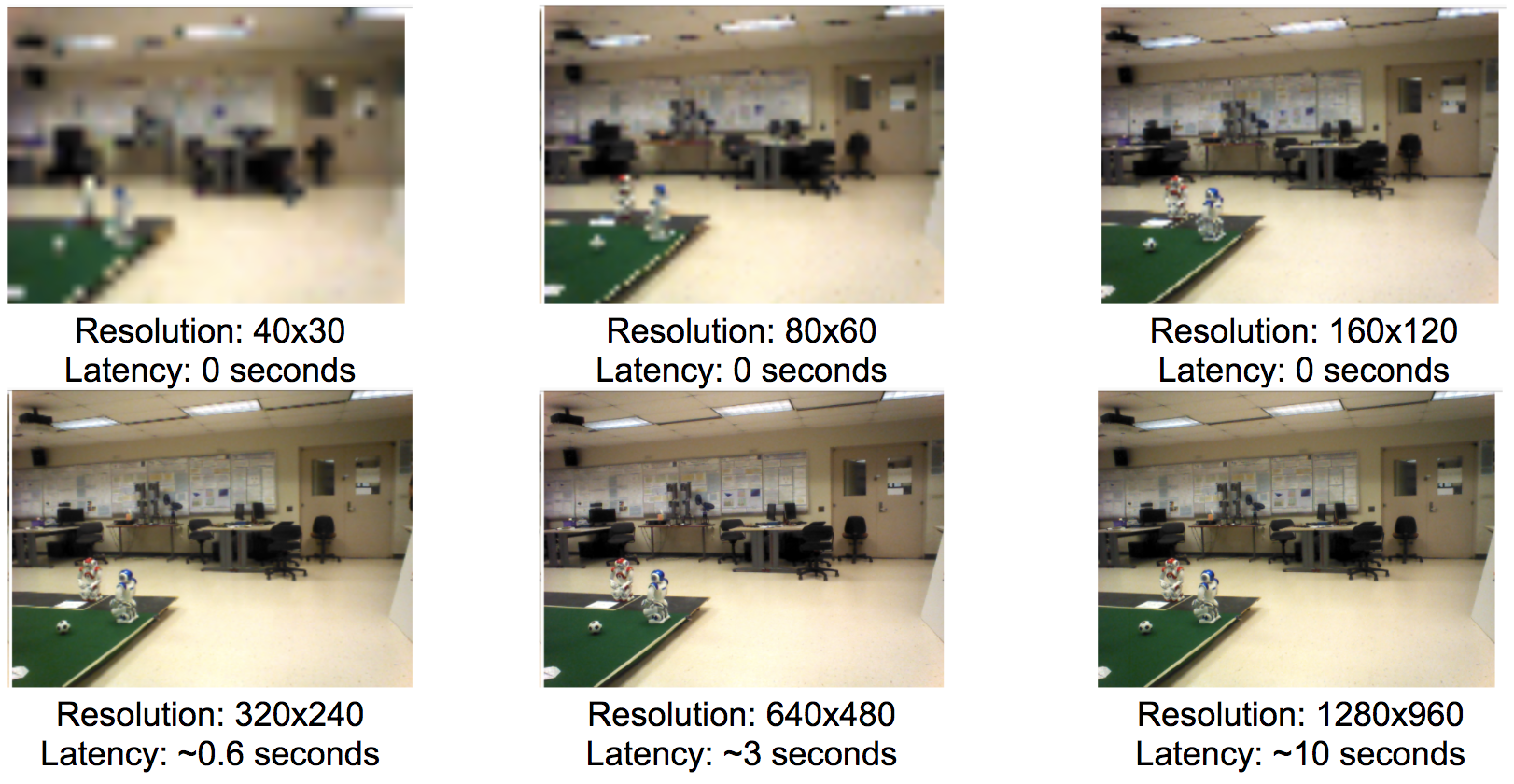
Although the camera can provide a high resolution image, this is an expensive process and can cause a great deal of latency and lag. For this reason, lower resolutions are being targeted in this project. The lowest resolution is 40×30 and there are six total resolutions, with each step up doubling both dimensions. For each of the resolutions, the latency was tested by determining the difference between real time and the time of the displayed image, which can be seen below. Our group aims to our product running with a resolution of 320×240 pixels at 15 fps.