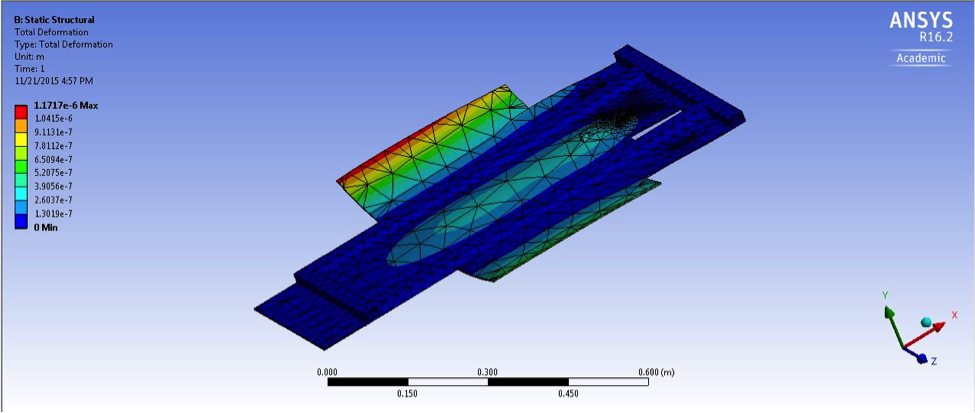
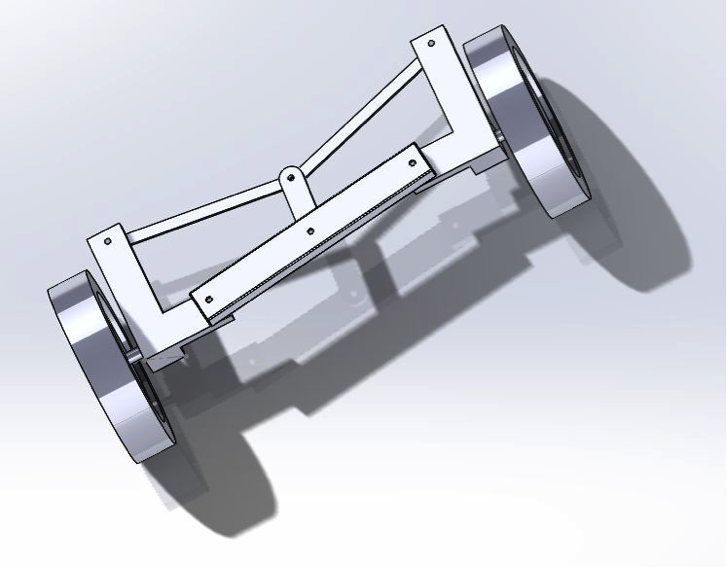
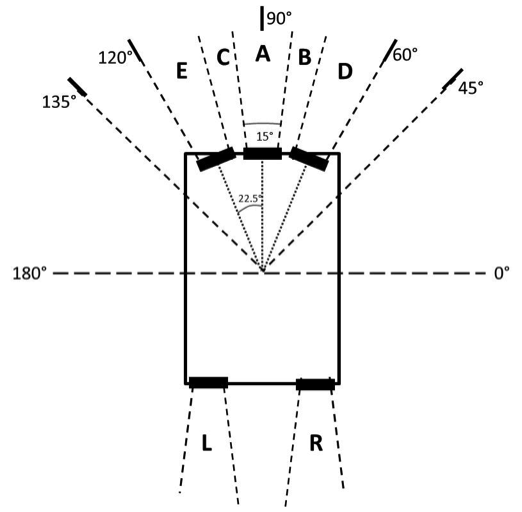
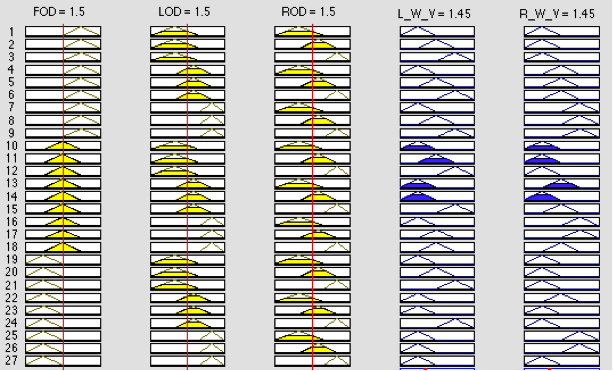
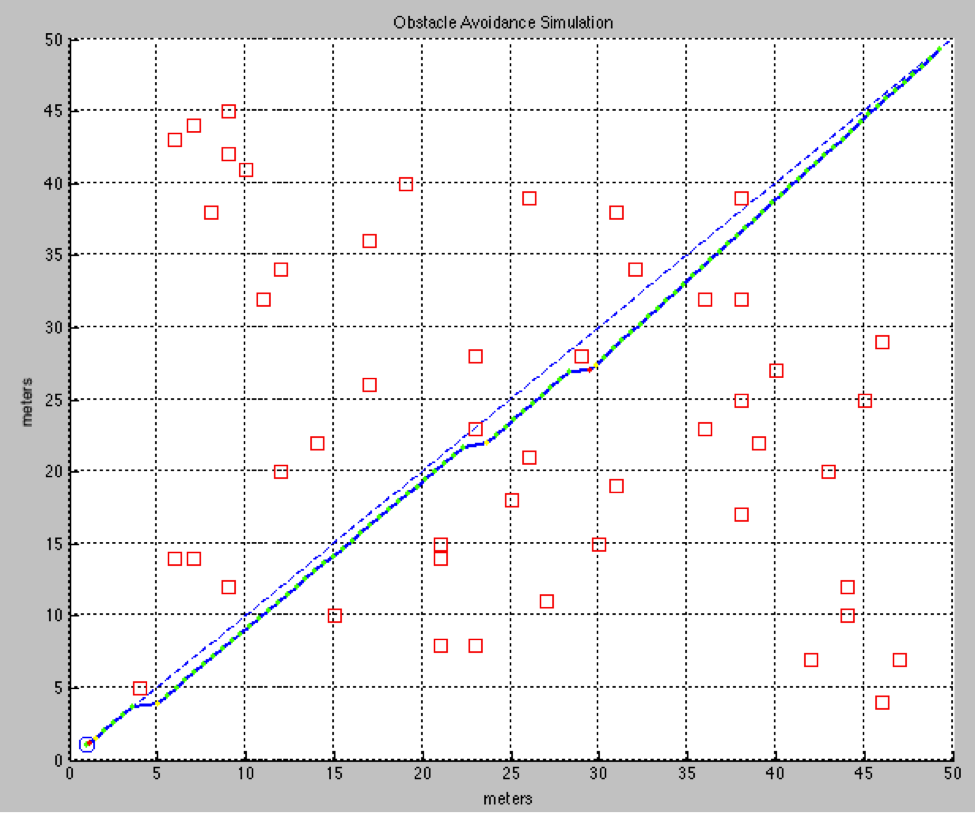
Webot simulation environment for the NAO robotCoregraphe programming environment for the NAO robotVehicle frame stress testing resultsModel of the mechanical vehicleModel of the vehicles steering systemDiagram depicting the field of vision and the arrangement of the ultrasonic sensorsFuzzy membership functions for the sensors input, used in the MATLAB simulationsFuzzy rules and the respective outputsMATLAB simulation results